



Geometric Fundamentals for Robot Design
From WikIRI
With an emphasis on mechanisms and kinematically constrained systems
Master's degree in Automatic Control and Robotics
| Update: This course will no longer be offered. However, you can still enjoy its contents through this website. It contains the full slides and lecture notes, which are suitable for self-study. Please contact the course professors for feedback, questions, or suggestions. |
|---|
 |  |  |
Contents |
Course data
- Course code: 240AR059.
- Prerequisites: Entry level courses in linear algebra, mechanics, and a working knowledge of some computer language. Here's a summary of the main concepts needed from such courses.
- Academic year: 2016-2017 (Yearly course editions since 2008-2009).
- Master programme: Master in Automatic Control and Robotics (Course catalogue).
- Semester: Q2 or Q4, February-May.
- ECTS Credits: 4.5.
- Teaching language: English.
- Professors in charge: Lluís Ros (coordinator) and Pablo Jiménez.
- Previous teachers: Oriol Bohigas and Montserrat Manubens.
- Unit in charge: Institut de Robòtica i Informàtica Industrial and Automatic Control Department (UPC).
- Room: Aula 004 in the FME building.
- Schedule: We'll meet every Tuesday from 10:00 to 13:00.
- Start date: February 14, 2017.
- Final exam: 12 June 2017.
- Consultation hours: To meet the teachers, please send us an email.
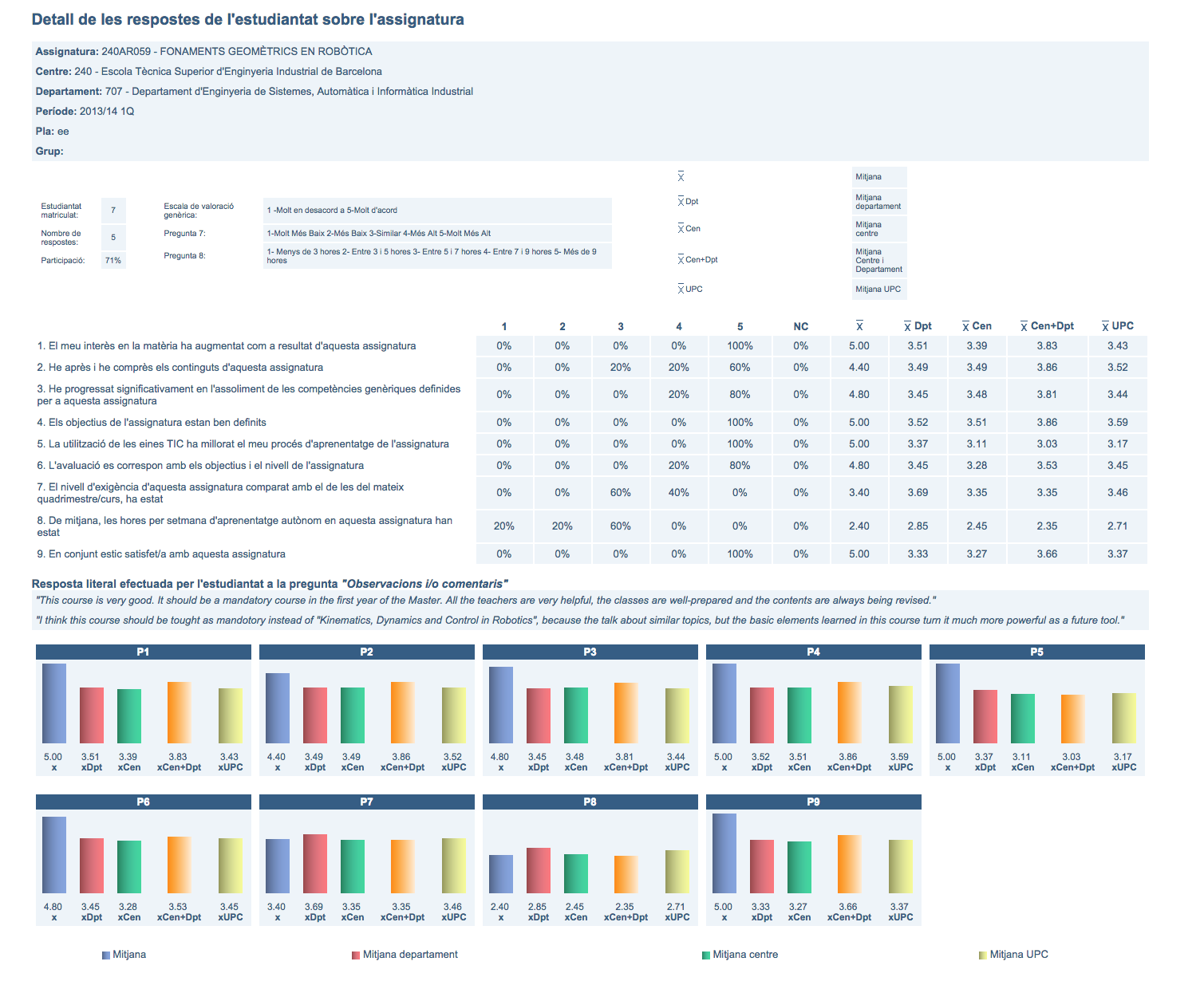
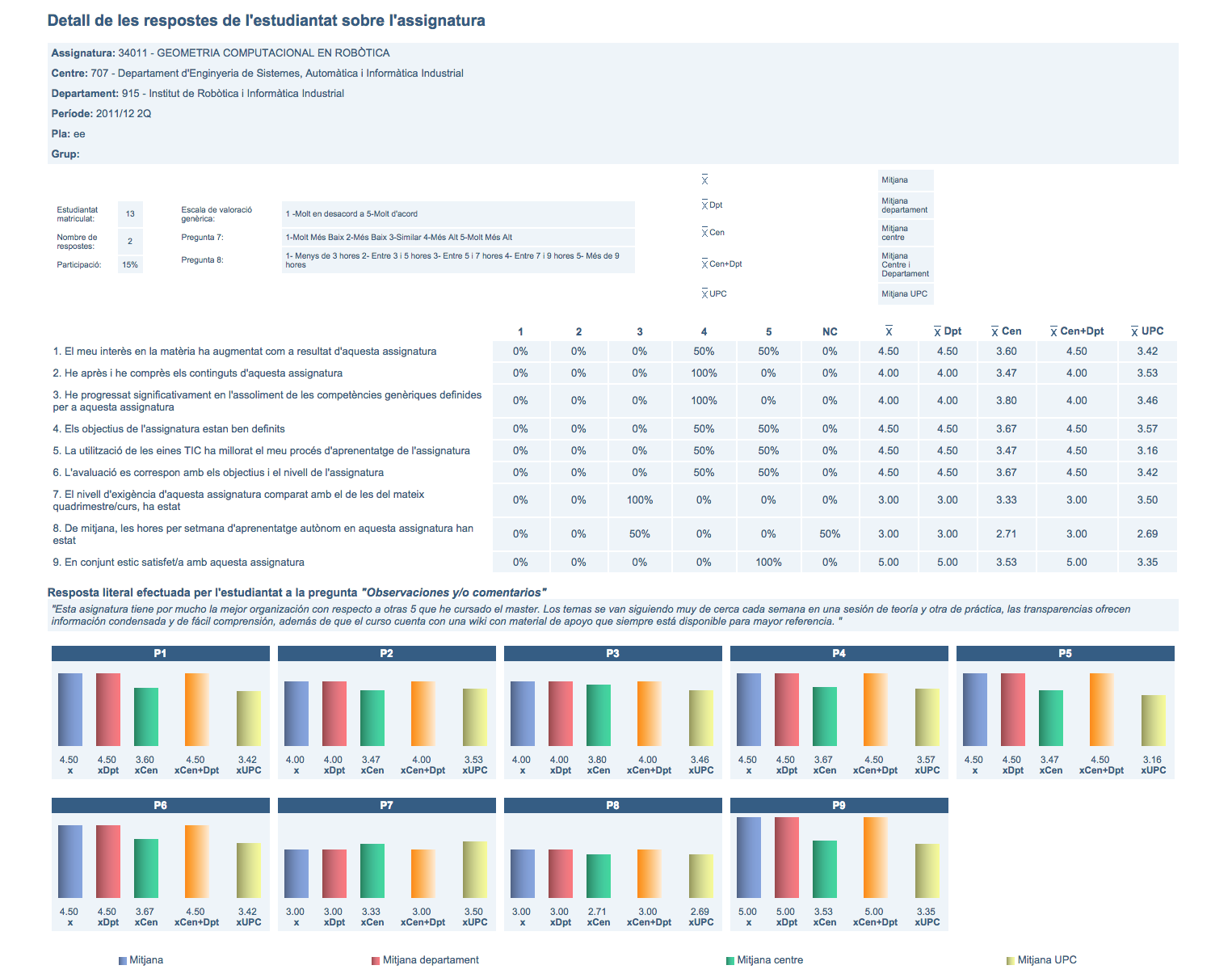
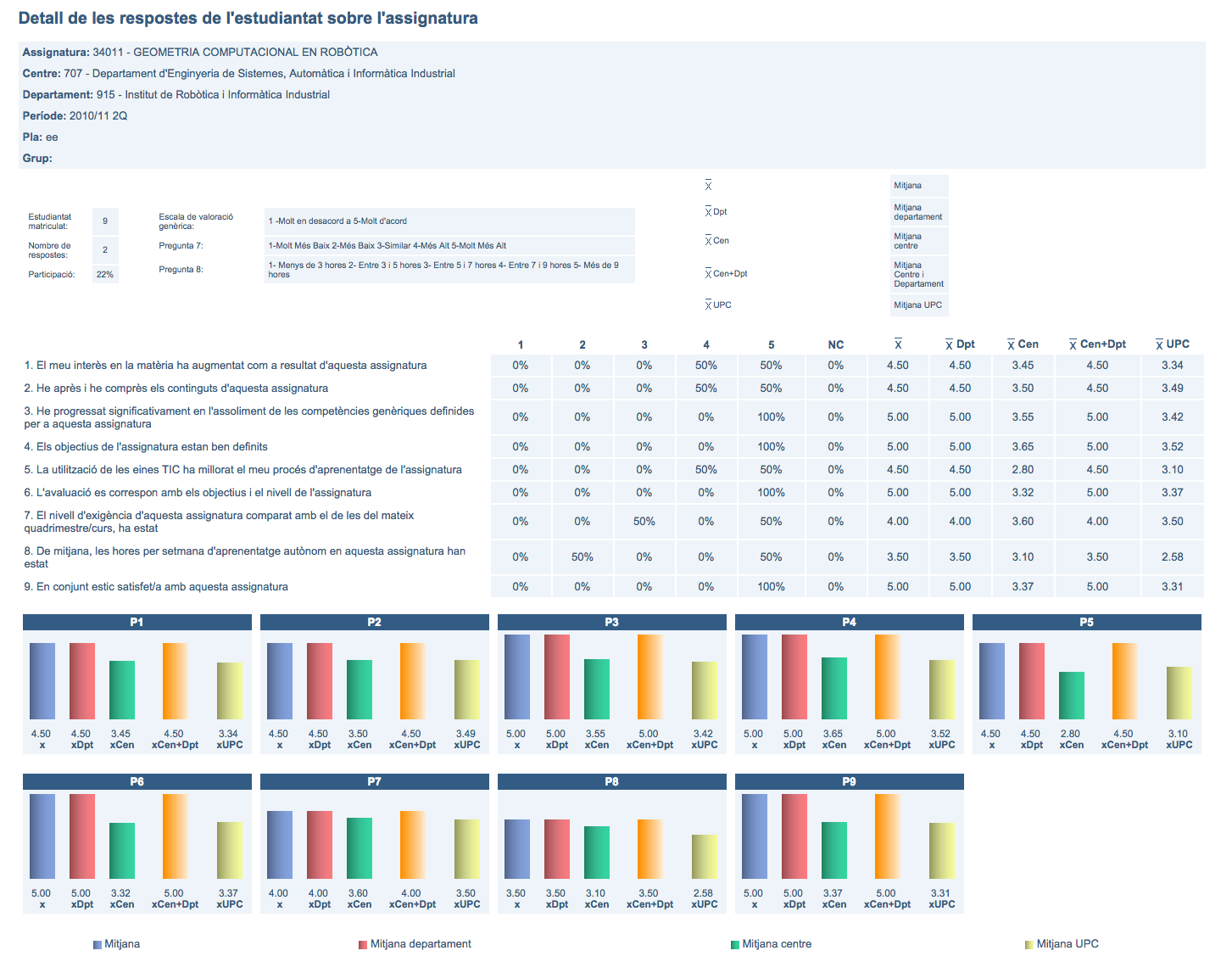
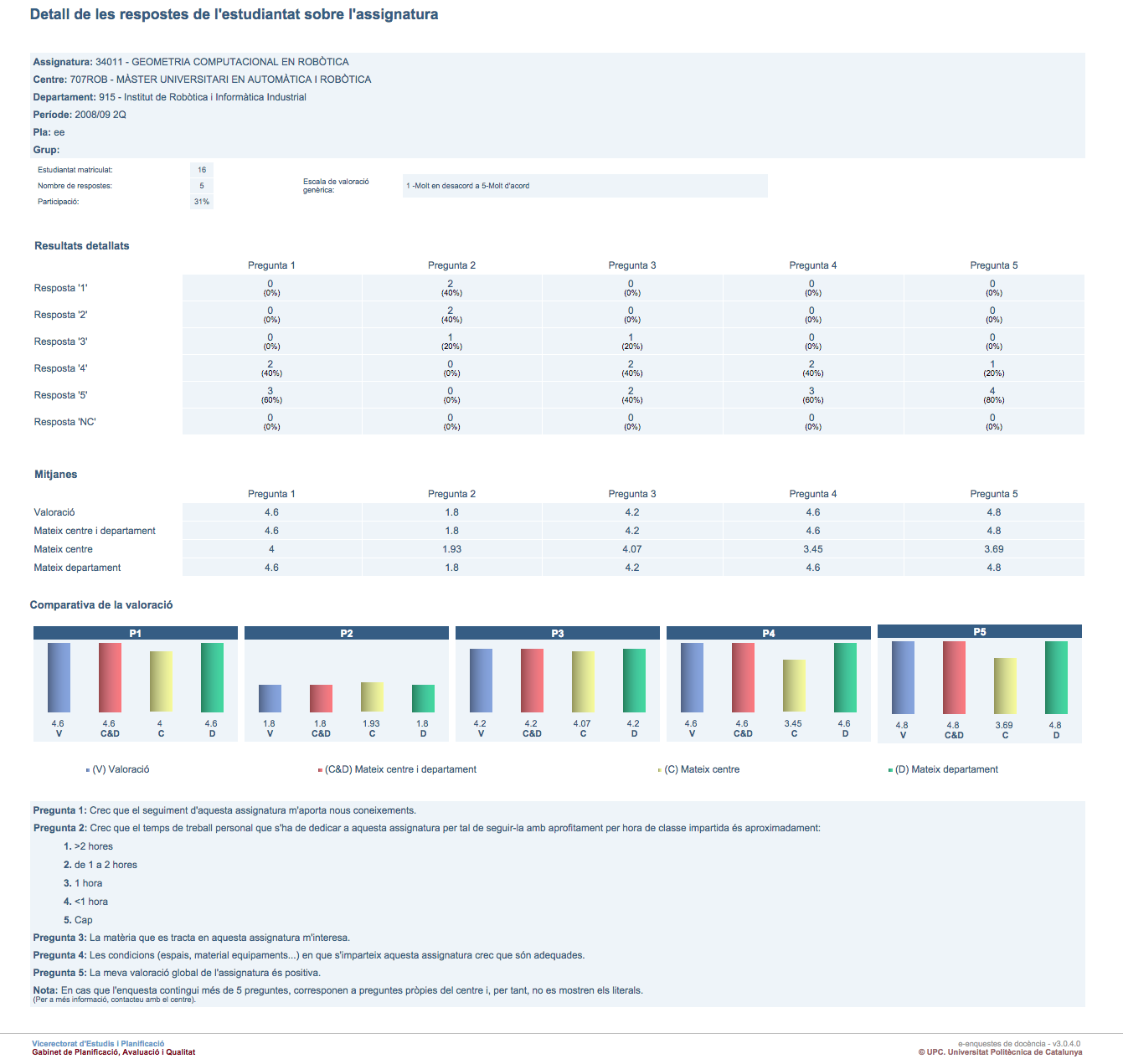
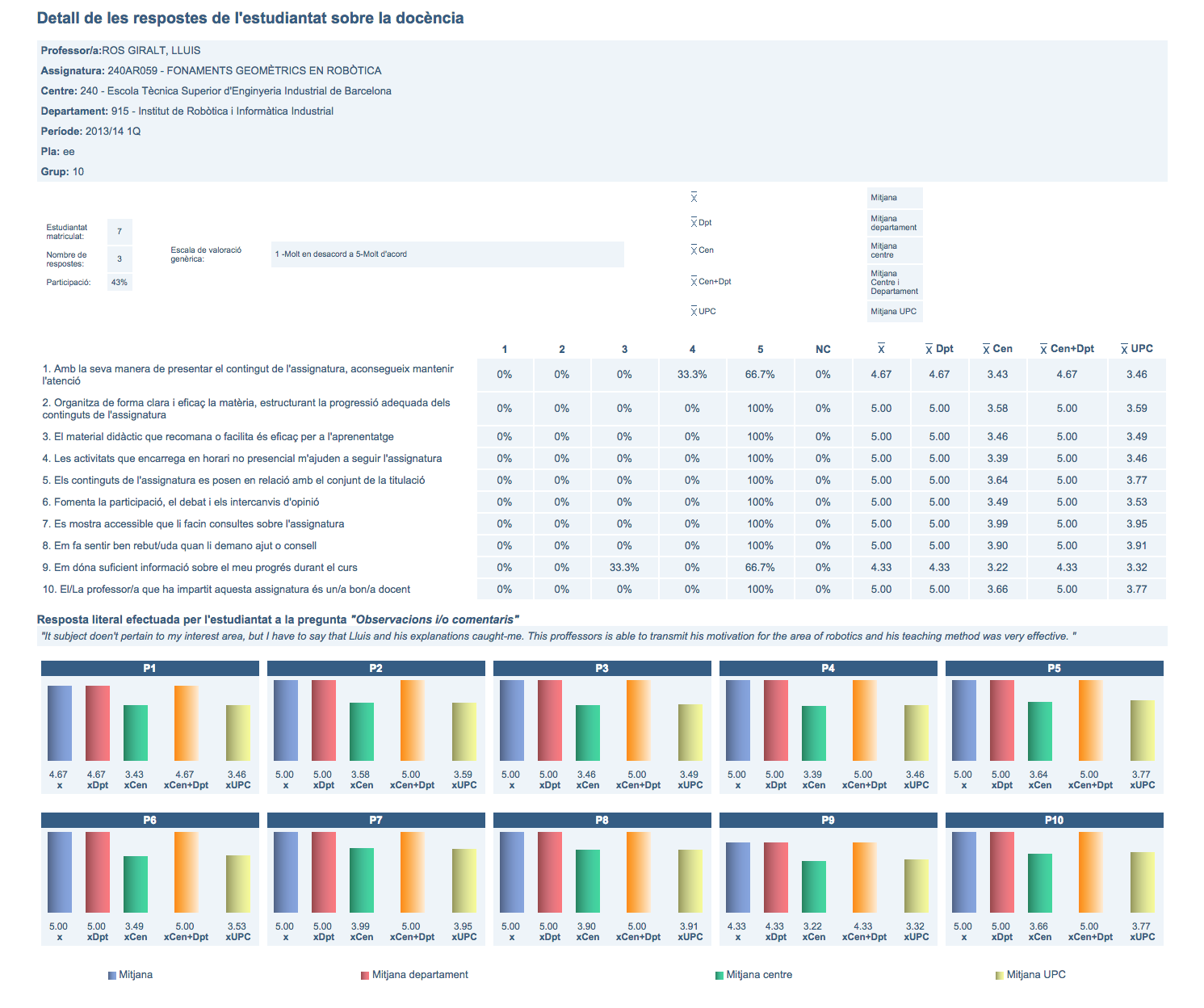
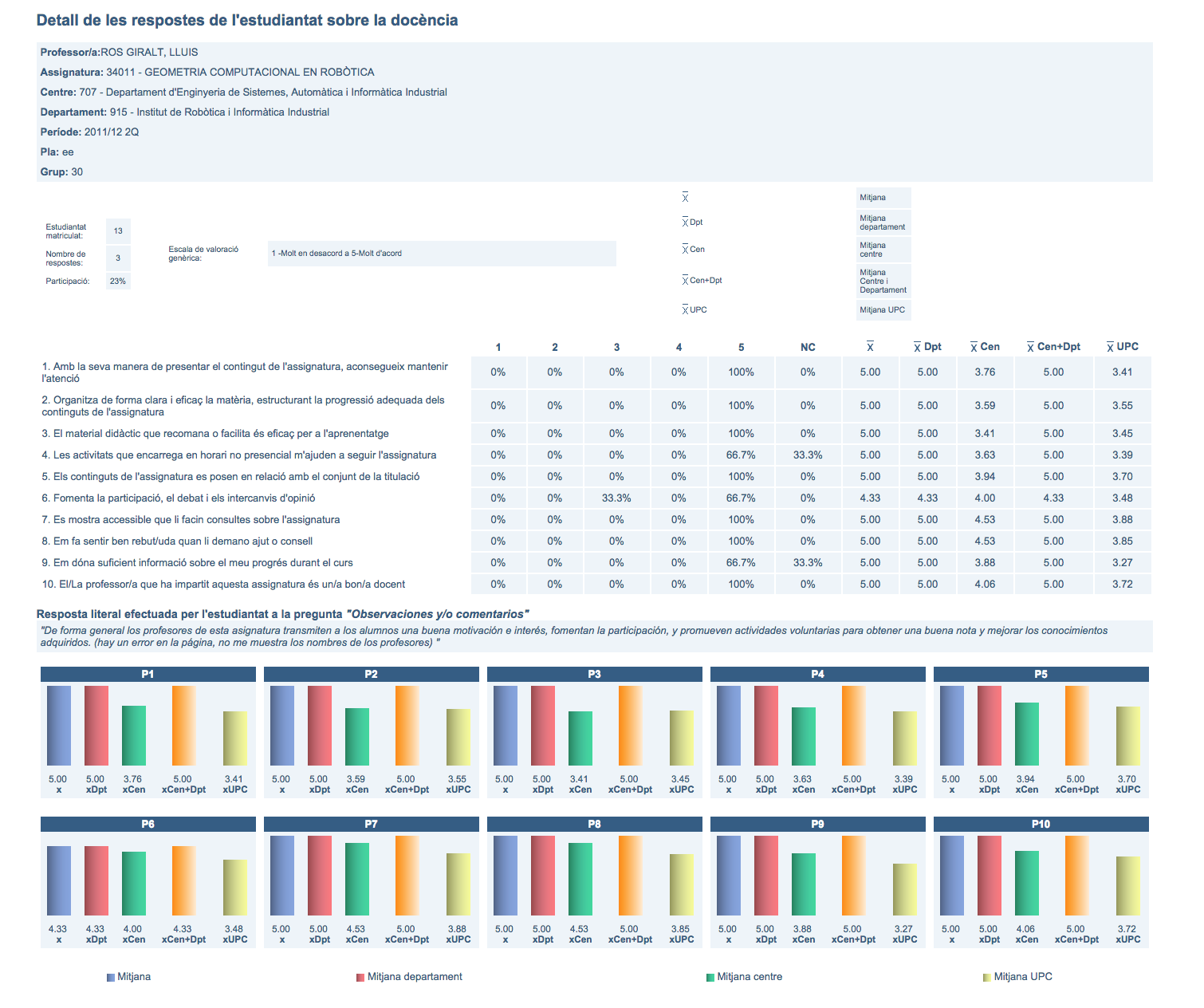
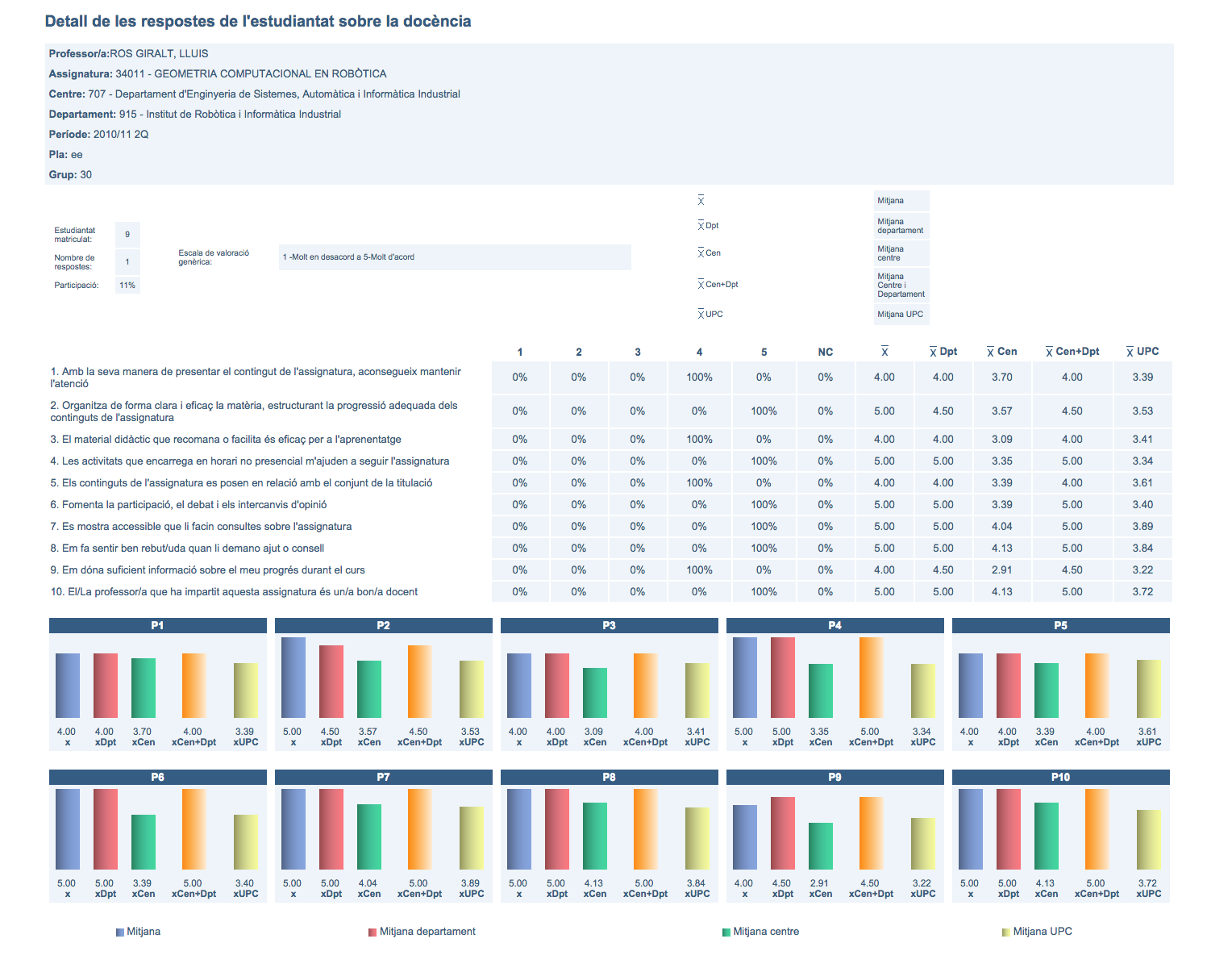
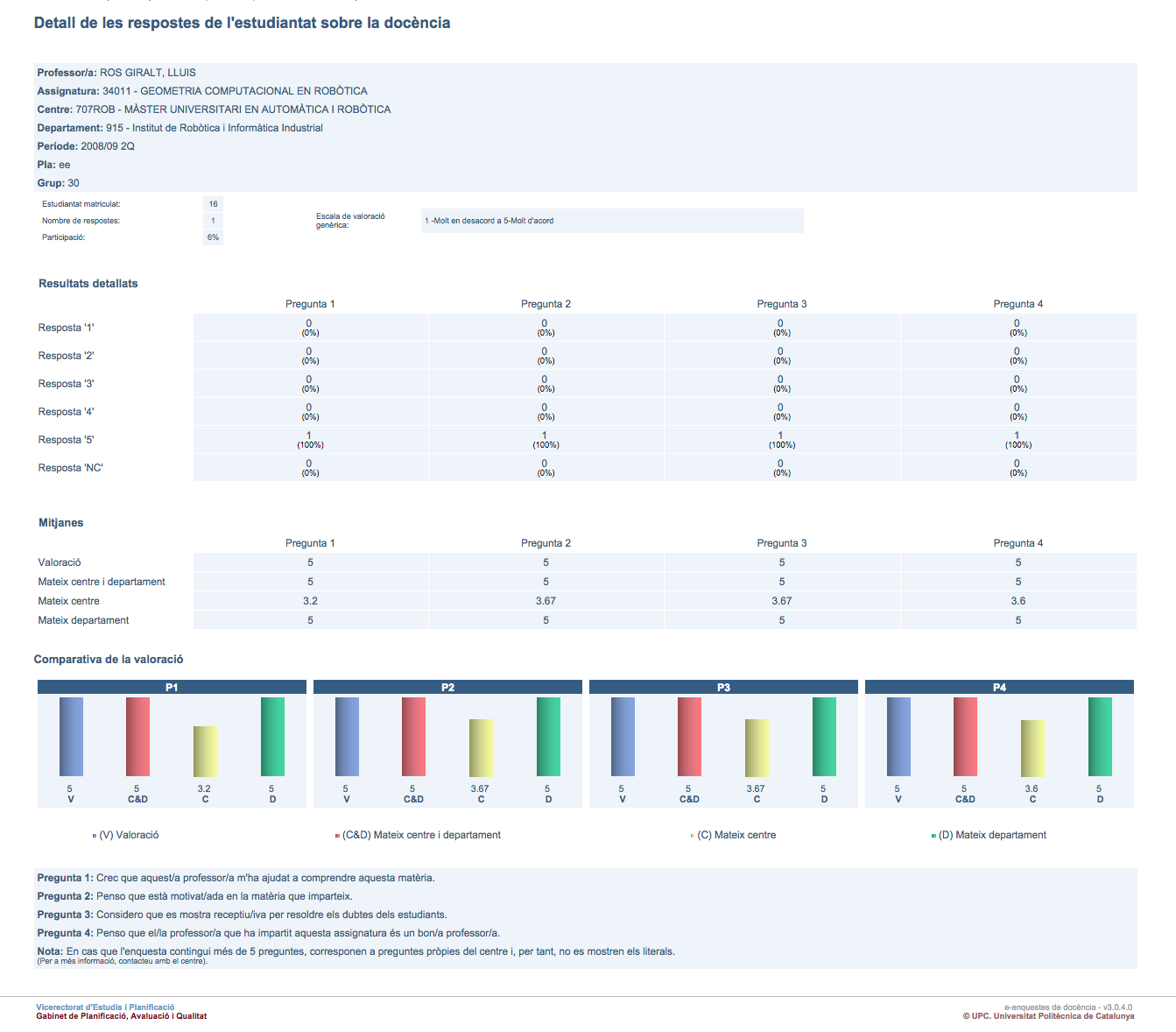
The students' opinion
Here's the opinion of past students on this course, collected by the UPC through anonymous surveys. Note that the course title has suffered a few changes over the years. Missing years correspond to those in which no survey was collected.
Course assessment:
- Survey course 2015-16.
- Survey course 2013-14.
- Survey course 2011-12.
- Survey course 2010-11.
- Survey course 2008-09.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Teachers' assessment:
- Survey course 2015-16.
- Survey course 2013-14.
- Survey course 2011-12.
- Survey course 2010-11.
- Survey course 2008-09.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Objective and skills to be gained








Geometry is essential to many human activities and it is deeply embodied in how humans think. In Robotics, it brings deep insight into the principles of robot motion and control, and develops creativity and intuition, abilities much needed for the proper design and study of robotic mechanisms. A main goal of this course is to get acquainted with such abilities.
Traditionally, the theories of statics and instantaneous kinematics have been learned separately in mechanical engineering courses. However, they proceed alongside one another, with the important principle of reciprocity linking them together. Using this principle, and the homogeneous representation of forces and velocities as screw vectors, this course aims at learning the two subjects in a unified manner. This simplifies the kinetostatic analysis of a robot, and allows us to derive rich information for robot design and programming. A global picture of the robot behaviour is gained, both in regular or singular configurations.
The course techniques are applied to conventional serial or parallel robots, but also to innovative systems like cable-driven manipulators, flying or climbing robots, or multi-robot formations.
At the end of this course, the successful student will know:
- How to formulate the constraint equations of multibody systems of arbitrary architecture, and how to solve them using advanced methods of position analysis.
- How to analyze the kinematic and static behavior of a robot using projective-geometric and screw-theoretic tools, both in regular and singular configurations.
- How the static behavior is tightly coupled to the kinematic one due to the principle of reciprocity.
- What are the physical consequences of traversing a singular configuration, and how this leads to control or dexterity issues.
- How to implement a hybrid control of force and position using the rigorous background of the course.
- How to apply the course knowledge to real-world systems like those in the inset pictures of this page.
Learning methodology
The subject will be worked out in theory and problem sessions mainly, and by means of a few practice miniprojects. Depending on the evolution of the course, a number of seminar sessions might be programmed as well. In such sessions, the active participation of the assistants is a fundamental aspect, and the teacher's task is, essentially, to direct the session, presenting and setting the topics in context, and coordinating the discussion among participants.
Grading
Grading is based on the score obtained in mandatory miniprojects and in a final exam. Small roundings of the score will be made to reflect the student's participation in the course: contributions to the debate of the topics, questions raised, and their resolution.
Clarity of presentation is a must, and may have an impact on the student score. If a solution report or exam is not clear or polished enough, the score can be decreased up to 30% of the maximum one achievable.
The final mark, M, will be:
- M = 0.25 P + 0.75 E
where:
- P = mark obtained in practice mini-projects (between 0 and 10)
- E = mark of the final exam (between 0 and 10)
A student will pass the course if M ≥ 5.
Commonly, the final exam consists of two parts:
- Part I: One or two problems, similar to those solved in exercise sessions.
- Part II: A quiz of short questions with multiple-choice answers.
Here there are some examples of such problems and questions:
- Exam 2009: Questions.
In the final exam, the student can only bring one calculator (with the capacity to perform matrix operations), 3 DINA A4 sheets of paper summarizing the course content, ball pen, pencil and rubber. Any device having wi-fi capability is not allowed.
Schedule, readings and exercises
See the course schedule at a glance.
The course is structured into five modules. Module 1 provides background tools to compute robot configurations needed through the course. Modules 2 to 4 are devoted to analyze such configurations from the statics and kinematics viewpoint, stressing the connections between the two theories. Module 5 applies this knowledge to develop hybrid control strategies for robot tasks involving contact with the environment.
There is an Appendix Module for those wishing to see an introduction to spatial screw theory (the extension to spatial mechanisms of the theory given in Modules 2 and 3).
You'll here find the whole course material. It includes commented slides or detailed lecture notes, all suitable for self-study:
Course presentation: 15 min., on Feb. 14 Slides.
Module 1: Mobility and position analysis
- Theory: 3.75 hours, on Feb. 14 and 21.
- Geogebra and CUIK session: 2 hours, on March 7.
- On March 7 we shall have a practical session from 9:30 to 12:00, in the computer room PC3 of the FME. We shall explain the basics of two software suites: Geogebra and Cuik. They are needed to solve two of the course miniprojects.
- Prior to this session, please solve problem 4 of the theory slides. Please also try to install Geogebra and CUIK in your laptop computer. The latter is not required for the session (we will work with the computer PCs), but it will allow you to solve the miniprojects later on. For the installation, refer to the instructions below.
- Exercises: 1 hour, on Feb. 28.
- Exercise list: We'll do problems 1, 2, and 3.
Module 2: Statics
- Theory: 4 hours, on Feb. 21 and 28.
- Exercises: 2.5 hours, on March 7, 14, and 21:
- March 7: Problem 3.
- March 14: Short questions 1-4.
- March 21: Problem 4.
Module 3: Instantaneous kinematics
- Theory: 4.5 hours, on March 14, 21, and 28.
- Slides, and their companion notes.
- Exercises: 2.5 hours, on March 21 and 28, April 18, and May 2.
- March 21: Problem 1.
- March 28: Problem 2 + short questions 1, 2, 4.
- April 18: Problem 3 + short question 3.
Module 4: Duality:
- Theory: 8.5 hours, on March 28, and April 18 and 25.
- Principle of Virtual Power and reciprocity: 1.5 hours.
- Slides, and companion notes.
- Principle of Virtual Power and reciprocity: 1.5 hours.
- Twists of freedom and wrenches of constraint of simple robots: 0.5 hours.
- Static analysis and duality diagram of a serial manipulator: 2 hours.
- Kinematic analysis and duality diagram of a parallel manipulator: 1.5 hours
- Reciprocal product methods and their extensions for fully-parallel robots: 3 hours.
- Exercises: 4 hours, on April 25, and May 9, 16, and 23.
- April 25: Problem 1 + short question 5.
- May 9: Problem 4 + short question 7.
- May 16: Problem 2 + short question 3.
- May 23: Problem 5 + short question 8.
Module 5: Introduction to hybrid control of force and position
- Theory: 4 hours, on May 9 and 16.
- Exercises: 2 hours, on May 23.
- May 23: Problem 1. Short questions 1, 2, and 4.
Appendix: General wrenches and twists
- We share these lecture notes with those wishing to see an introduction to spatial screw theory, i.e., the extension of the theory given in Modules 2 and 3 to spatial mechanisms. The student can also work out these exercises on his own, whose solutions can be found in these slides.
Miniprojects
To pass the course, the student has to work out these miniprojects:
- Issued on March 7. Due on April 4.
- Miniproject 2: Manipulation in the space shuttle
- Issued on March 28. Due on May 31 (Part B requires the hybrid control module).
- Miniproject 3: Singularity analysis of a parallel robot
- Issued on May 2. Due on May 31.
You'll need to install Geogebra and CUIK to solve miniprojects 1 and 3.
The students can work individually or in groups of at most 3 people. Every group has to deliver just one report explaining their solution to the miniproject, and the source files asked for in the miniproject. The report (in pdf form) and the files (either cuik or ggb files) should be sent by email to Lluís Ros no later than the due date indicated.
Handwritten manuscripts are allowed, but clarity of presentation is a must. If a report is not polished enough in its writing, the final score may be reduced in up to 30% of the maximum score achievable. Please justify all your developments.
Miniproject reports will be reviewed by the teachers during the course, and returned back to students with annotated feedback, and a score.
Geogebra and CUIK: Installation and usage
Installing CUIK:
- The preferred way is to install CUIK natively under Ubuntu 16.04.
- In other operating systems, you can also install a virtual machine with CUIK preinstalled.
Installing Geogebra:
- In Ubuntu simply execute sudo apt-get install geogebra in a terminal window.
- In other operating systems, install Geogebra Classic for Desktop from Geogebra's website.
Help on the CUIK suite:
- The class slides should be sufficient, but this paper gives a short introduction to the software (see Section "Branch-and-prune methods").
- Further help in the CUIK suite web page.
Help on Geogebra:
- If you wish to install Geogebra in your native operating system, download it from Geogebra's web.
- Geogebra is very intuitive to use, but we recommend you to learn the basics from the Geogebra QuickStart Guide (just 7 pages).
- After that, you may find the Introduction to Geogebra or Geogebra's html manual occasionally useful too, within Geogebra's help page.
Bibliography
The central part of the course follows the beautiful line of argument traced by Joseph Duffy in his book:
- Joseph Duffy. "Statics and Kinematics with Applications to Robotics". Cambridge University Press, 1996. Book partially available from Google Books. Here's a review of this book by J.-P. Merlet, appeared in The International Journal of Robotics Research, Vol. 16, No. 3, page 410, June 1997. Please see also this errata file compiled by course teachers and students, and this table of notation used in the book.
{kind=link}
Recommended material for further study:
- What is a parallel robot? Definition, origins, design issues, manufacturers, and more, beautifully described and illustrated.
- Joseph K. Davidson and Kenneth H. Hunt. "Robots and Screw Theory: Applications of Kinematics and Statics to Robotics". Oxford University Press, 2004. Book partially available in Google books. Here's a review of this book by G. Pennock, appeared in the ASME Journal of Mechanical Design, Vol. 126, pp. 763-764, July 2004.
- A very interesting video lecture by the late Prof. Hunt.
- A PhD thesis on general tools for the numerical computation and avoidance of robot singularities, by O. Bohigas. See the video lecture of the PhD defence.
- Gilbert Strang. "The fundamental theorem of Linear Algebra". The American Mathematical Monthly, Vol. 100, No. 9 (Nov. 1993), pp. 848-855.
- Gilbert Strang. Introduction to Linear Algebra, 4th edition. Wellesley-Cambridge Press, 2009.
- The excellent video lectures associated with the previous book.
- Felix Klein. "Elementary Mathematics from an Advanced Standpoint". Dover 2004.
- Kenneth H. Hunt. "Kinematic Geometry of Mechanisms". Oxford Science Publications 1978.
- Robert Stawell Ball. "A Treatise on the Theory of Screws". Cambridge University Press. Reprinted in 1998, from the first 1900 edition.
Links
- Tutorial on Installing the CUIK suite virtual machine. Works for Windows, MAC OS, or Linux.
- Tutorial on Installing the CUIK suite natively. Works on Ubuntu 14.04 or 16.04.
- Final master thesis rules.
- Final Master Thesis proposals at ETSEIB (tune search filter to your needs).
- ETSEIB calendar, which we follow in the course.
- Full map of the FME