The Challenge
The competition consists on unfolding and folding rectangular clothes from the Household Cloth Object Set. Participants will receive this set for free, being able to keep it afterwards. Our intention is to identify and gather the community, so we look for an easy entry point where participants are able to participate if they are interested in perception, manipulation, or both.
The competition is part of the 7th Robotic Grasping and Manipulation Competition of ICRA 2023.
Details of the setups, tasks and scoring can be found on the Rulebook.
Perception
Task 1.1. Grasp point detection
This task consists on selecting a suitable grasping point on a cloth that can be either crumpled, folded or flat on a table. The selected point must correspond to a graspable corner of the cloth, providing the necessary information, such as coordinates and approach direction vector.
Manipulation
Task 2.1. Unfolding
This task consists on grasping the cloth and manipulating it until it is placed flat on the table. The cloth initial configuration can be either crumpled or folded and the final configuration of the task is flat. This task can be performed in many different ways, having no limitations on the strategies used. That is to say, it can be performed for example with a bimanual robotic system by grasping directly the corners, performing edge tracing to the second corner or by pushing and sliding the cloth on the table until it is flat. However, the evaluation will take into account several parameters as the total execution time or the number of state transitions performed since the task starts.
Task 2.2. Folding
The last task of the track consists on folding the cloth times once is flat on the table. In order to correctly perform this task, the object must be folded following the folding protocol.
Deadlines
-
Registration deadline: 31st March 2023 -
Acceptance announcement: 3rd April 2023 -
Dry run: 15th-17th May 2023 -
Online Competition: 22-26 May 2023 -
Competition broadcasting: 30th May - 2nd June 2023
The Household Cloth Object Set
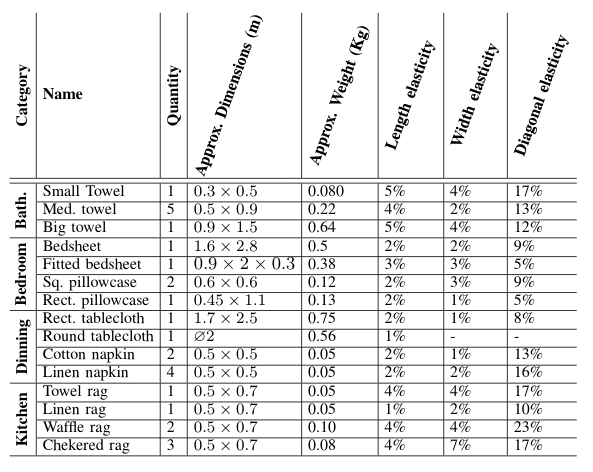
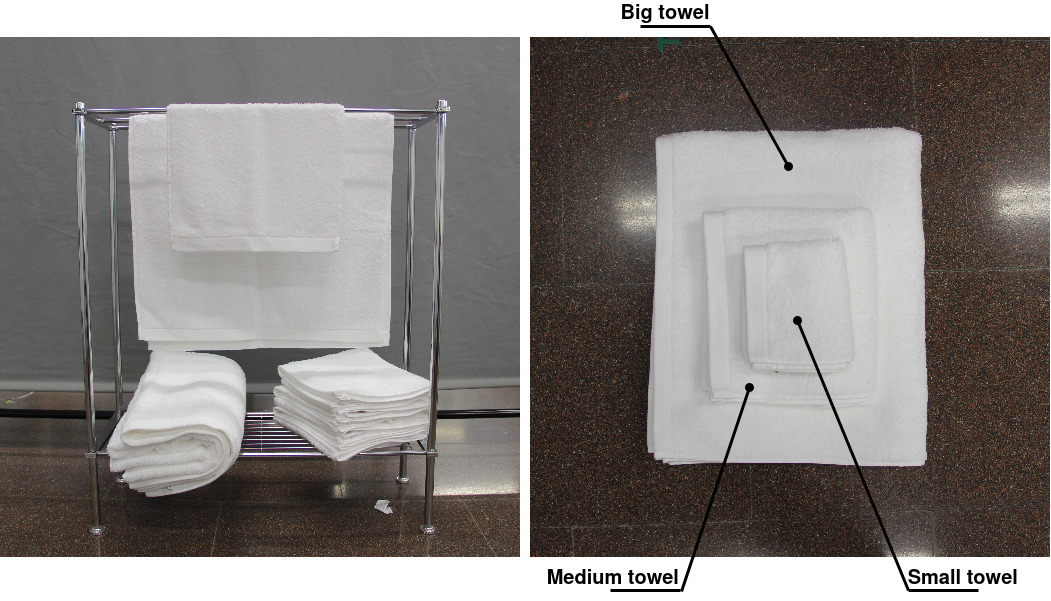
The object set consists on a collection of common household cloth objects that can be found in any house, including towels, bedsheets, tablecloths and napkins. The following images presents an overview of the objects from the set. The table picks up the physical properties of the objects as their dimension, weight and % of elasticity under tension. For more details see the related website.
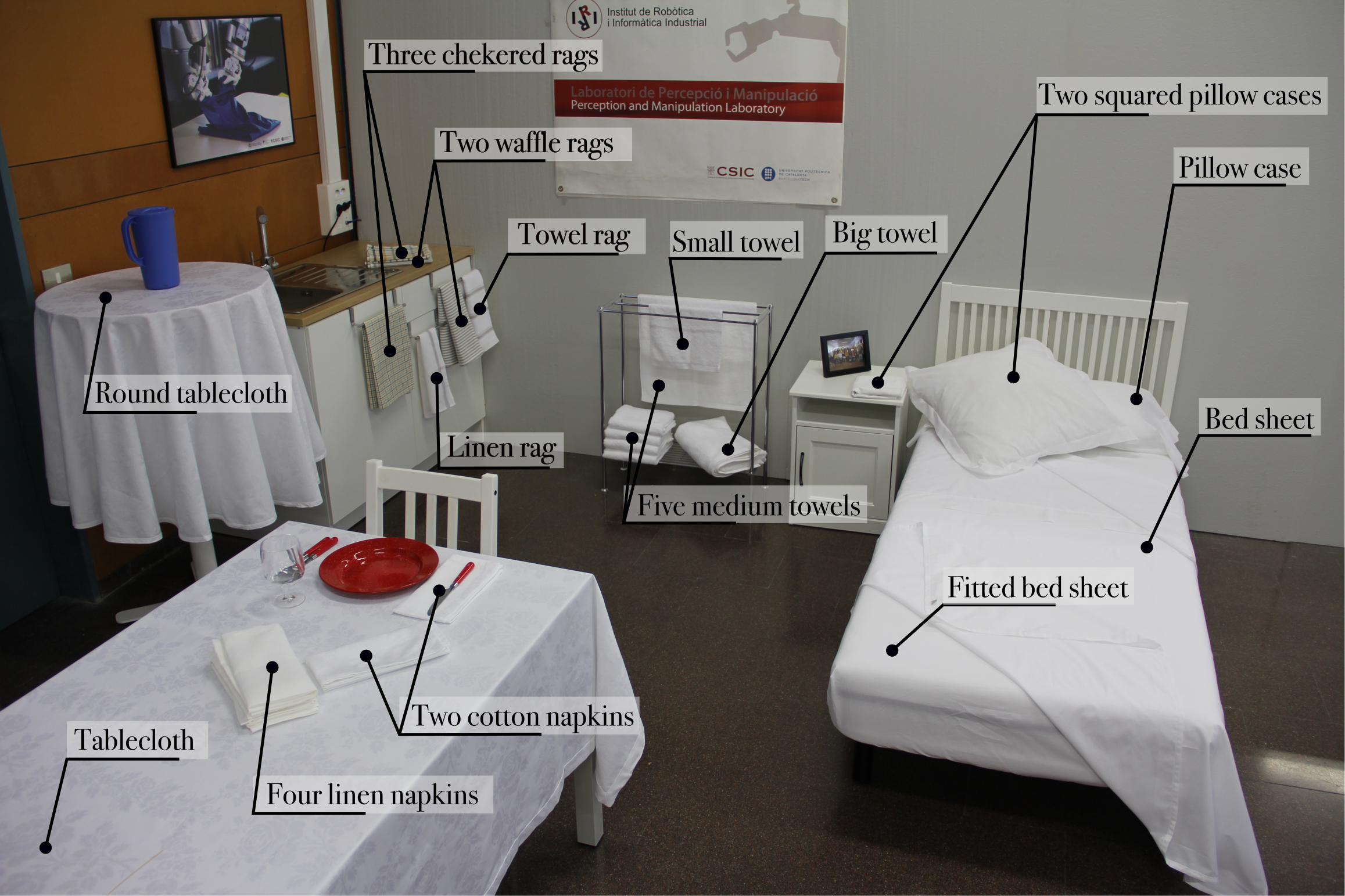
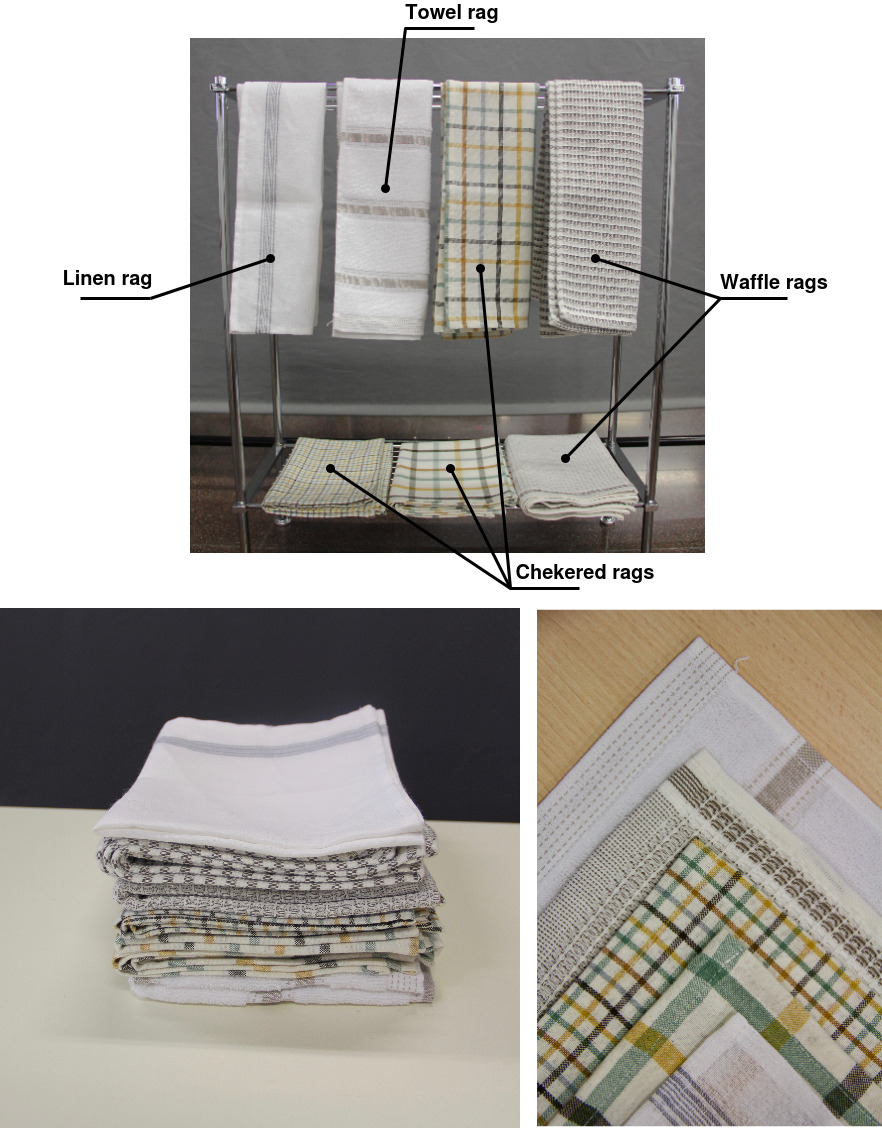
| KITCHEN: Towel, linen, waffle and chekered rags |
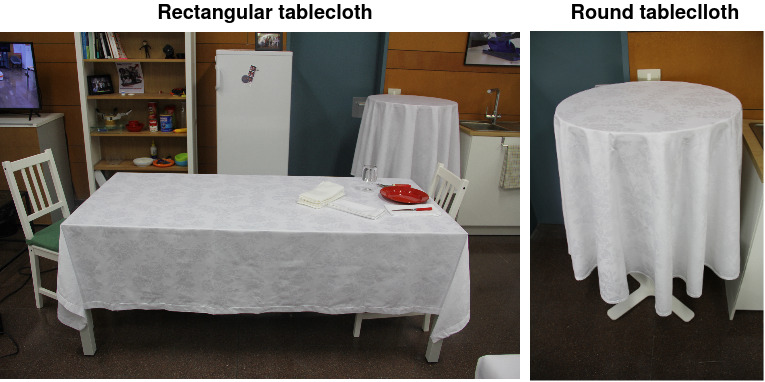
DINNING ROOM: Rectangular and round tablecloth, cotton and linen napkins |
BEDROOM: Bedsheet, fitted bedsheet, rectangular and squared pillowcases |
BATHROOM: Small, medium and big towels |
|---|---|---|---|
 |
 |
 |
 |
 Click table to zoom
Click images for details
Click table to zoom
Click images for details
Participants ICRA 2023
The second edition of the competition has been celebrated at ICRA 2023 in London, UK.
Teams:
WINNERS
The winner of the PERCEPTION is: ViCoS-FRI team from the University of Ljubljana in Slovenia.
The winner of the UNFOLDING and the FOLDING is: IDLab-AIRO team from Ghent University in Belgium.
Previous edition IROS 2022
This competition has run previously as part of other editions of the RGM Competitions. The last competition was celebrated at IROS 2022 in Japan.
Teams:

Organizing Committe
Irene Garcia-Camacho (igarcia@iri.upc.edu)
Institut de Robòtica i Informàtica Industrial (CSIC-UPC)
Júlia Borràs
Institut de Robòtica i Informàtica Industrial (CSIC-UPC)
Berk Calli
Worcester Polytechnic Institute
Adam Norton
University of Massachusetts Lowell
Guillem Alenyà
Institut de Robòtica i Informàtica Industrial (CSIC-UPC)
 93 4015791
93 4015791  igarcia (at) iri.upc.edu
igarcia (at) iri.upc.edu