Irene Garcia-Camacho1, Alberta Longhini2, Michael C. Welle 2, Guillem Alenyà1, Danica Kragic2 and Júlia Borràs1
1 Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Barcelona, Spain.
2 Robotics, Perception and Learning Lab, KTH Royal Isntitute of Technology, Stockholm, Sweden.
Abstract - The field of robotics faces inherent challenges in manipulating deformable objects, particularly in understanding and standardizing fabric properties like elasticity, stiffness, and friction. While the significance of these properties is evident in the realm of cloth manipulation, accurately categorising and comprehending them in real-world applications remains elusive. This study sets out to address two primary objectives: (1) to provide a framework suitable for robotics applications to characterise cloth objects, and (2) to study how these properties influence robotic manipulation tasks. Our preliminary results validate the framework’s ability to characterise cloth properties and compare cloth sets, and reveal the influence that different properties have on the result of some manipulation primitives. We believe that, in general, results on the manipulation of clothes should be reported along with a better description of the garments used in the evaluation.
Textile Characterization
We provide a step-by-step of the measurement systems to quantify the properties of cloth objects.
Supplementary material
We provide some templates to facilitate the application of the measurement systems, including a printable ruler for measuring the elasticity and friction and an Aruco pattern to measure the stiffness.
The code to measure the stiffness of clothes can be found on the Github page.
Physical properties
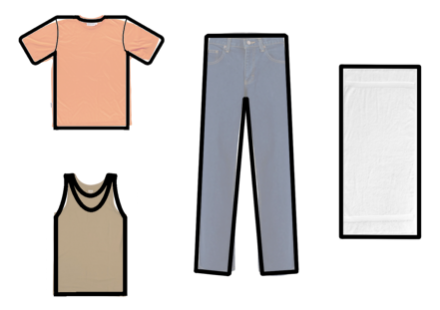
| SHAPE | SIZE | WEIGHT |
|---|---|---|
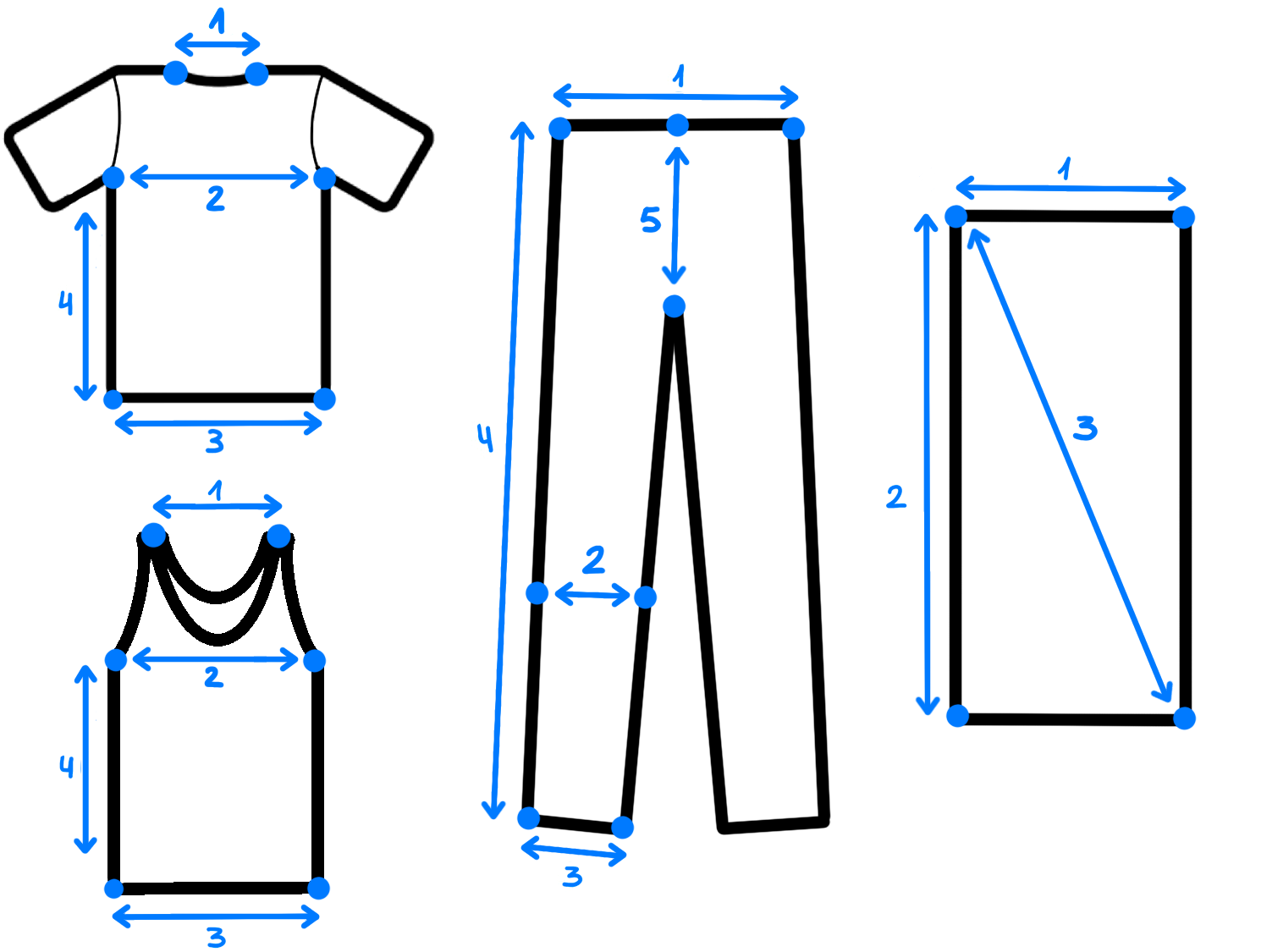
| Identify the different types of cloth objects based on its shape. | Measure the length on each line according to the cloth type: | Measure the weight of the object in grams using a scale. |
 |
 |
 |
| COLOR | FABRIC MATERIAL | CONSTRUCTION TECHNIQUE |
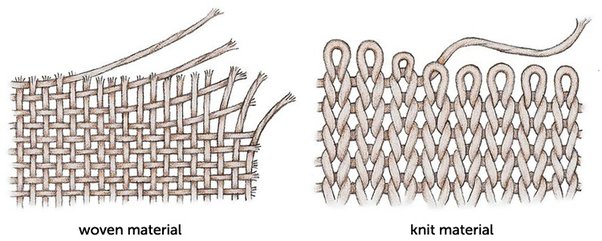
| Identify the different primary and secondary colors, as well as the different prints. | Identify the material of which the object is composed. | Identify if the cloth object has a woven or knitted yarn. |
 |
 |
 |
Mechanical properties
STIFFNESS
- Setup the tripod with a zenital RGB camera.
- Place the Aruco template inside the field of view of the camera and take a zenital image.
- If the object has an edge longer than 50cm or is not rectangular, fold the object in a rectangular shape following the folding protocols.
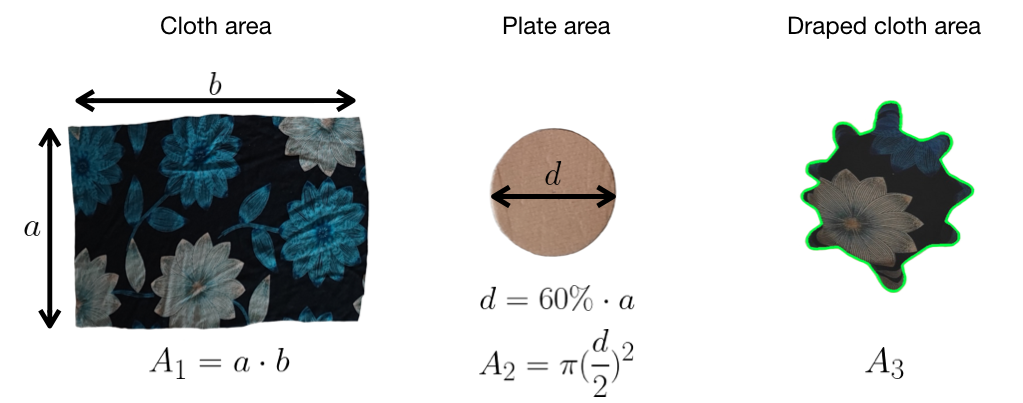
- Measure the length of the shortest edge (a) of the cloth sample.
- Create a cirular plate, wither cutting a cardboard or 3D printed, with diameter (d) of a 60% of the measured length (a).
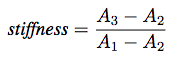
- Measure the cloth area A1 (A1=short edge x long edge) and the circular plate diameter A2 (A2=pir2).
- Place the sample on top of the circular plate in a vertical structure.
- Take a zenital image of the draped sample.
- Execute the provided code using the images taken in steps 2 and 7 to obtain the draped area A3.
- Measure the stiffness % through the stiffness formula.
- Repeat steps 3 to 6 for each cloth sample.
FRICTION
- Setup the ruler layout in a wall and the flat surface with one edge aligned to it.
- Fix a standard printing paper in the flat surface.
- If the object has an edge longer than 50cm or is not rectangular, fold the object in a rectangular shape following the folding protocols.
- Place the cloth object inside the paper.
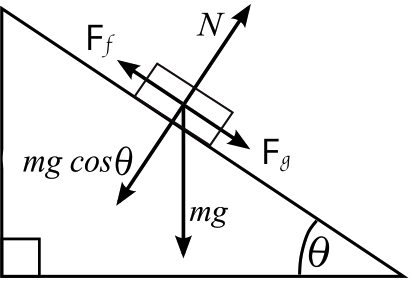
- Start lifting gradually the table from one edge until the object starts to slide.
- Incline the table holding it in the previous measured height.
- Place again the object inside the paper, if it slide decrease the table inclination 1 centimetre.
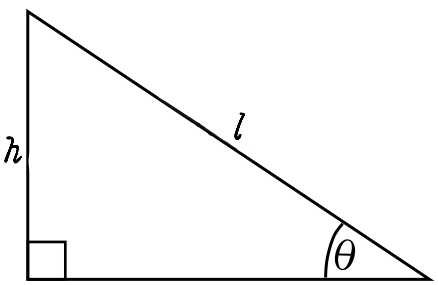
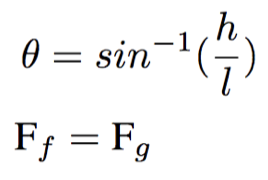
- Repeat steps 6 and 7 until a height (h) where the object does not slide.
- Use this last height (h) to measure the friction force with the friction formulas, knowing the length of the surface (l).
- Repeat steps 3 to 9 for each cloth sample.

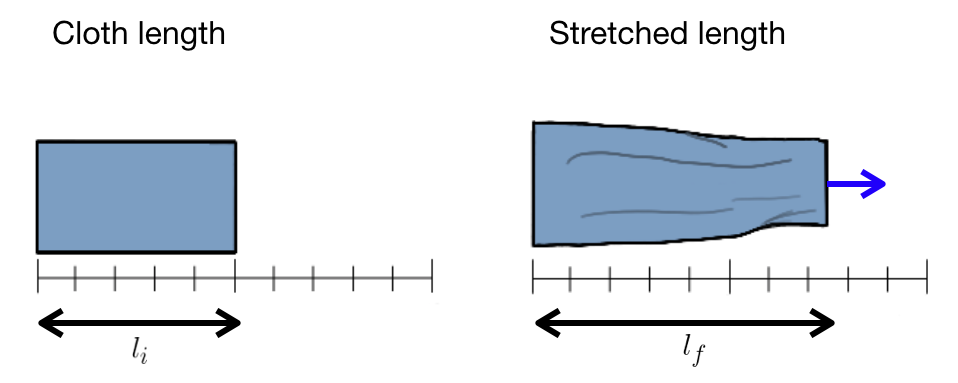
ELASTICITY
- Setup the ruler fixing it to a table, the clamp and the luggage scale.
- Attach the clamp to one point of the cloth sample and the luggage scale to the clamp.
- Place the other free point of the cloth sample aligned to the 0 of the scale.
- Obtain the line length of the cloth sample in resting position (li).
- Stretch the cloth object by subjecting the point in 0 and pulling the lugagge scale until 0.5Kg.
- Obtain this stretched length (lf).
- Measure the elasticity % with the following formula:
- Repeat steps 2 to 6 for each stretching line.
- Repeat steps 2 to 7 for each cloth sample.
Benchmarking cloth sets
The measurement systems can be used, in addition to characterising individual objects, to compare and evaluate different sets of cloth through the quantity of variability that they provide in each property. This can serve to imrpove the creation of a cloth set that suits its purpose. To do so, it is necessary to take measures of the abovementioned properties of all the cloth objects in the set and represent the variability in a radar chart computing the difference between the maximum and minimum values of each property.
This has been done for three existing cloth set used in the cloth manipulation literature. The radar chart for each cloth sets are shown in the corresponding links.
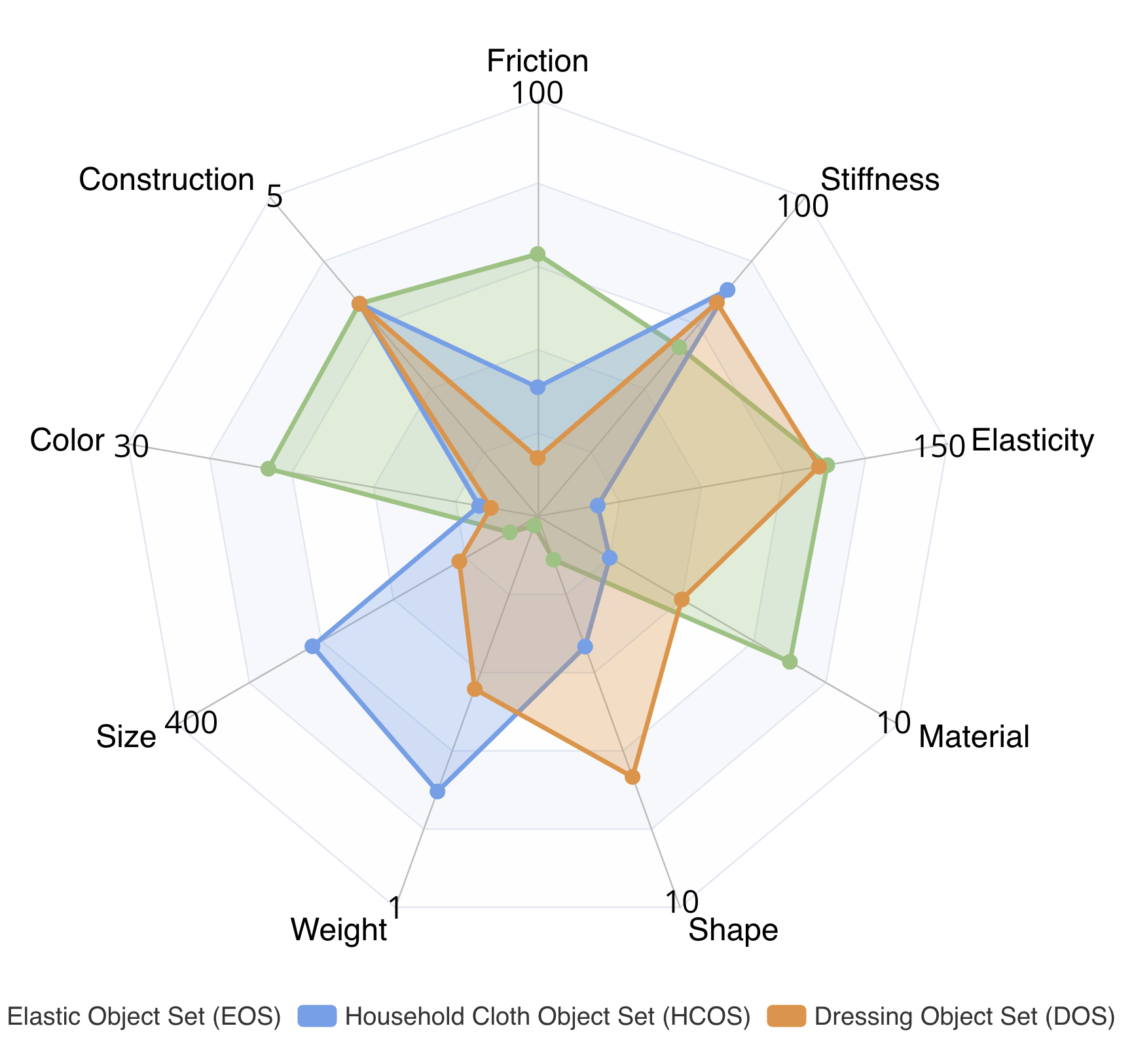
Click images to see comparison
EOS: A. Longhini, M. Moletta, A. Reichlin, M. C. Welle, D. Held, Z. Erickson and D. Kragic, "Edo-net: Learning elastic properties of deformable objects from graph dynamics", in IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3875-3881.
HCOS: I. Garcia-Camacho, J. Borràs, B- Calli, A. Norton and G. Alenyà", "Household cloth object set: Fostering benchmarking in deformable object manipulation", in IEEE Robotics and Automation Letters, 2022, vol. 7, no. 3, pp. 5866-5873.
DOS: O. Gustavsson, T. Ziegler, M. Welle, J. Bütepage, A. Varava and D. Kragic, "Cloth manipulation based on category classification and landmark detection", in International Journal of Advanced Robotic Systems, 2022.
Influence in robotic manipulation
Set of primitives
Accompanying video
Citation
I. Garcia-Camacho, A. Longhini, M.C. Welle, G. Alenyà, D. Kragic and J. Borràs, "Standardization of cloth objects and its relevance in robotic manipulation", in IEEE International Conference on Robotics and Automation, 2024
Contact
Send any comments or questions to Irene at: igarcia@iri.upc.edu