S. Foix, G. Alenyà, B. Dellen and C. Torras
In our first approach we use a spring-mass model to improve the final registration of 3D noisy data. Once a set of consecutive 3D point clouds around an object have been correctly registered, our method reduces the noise and removes the outliers by treating point clouds as a system of interacting masses connected via elastic forces.
A more sofisticated way of improving noisy 3D data registration consists of using a probabilistic approach to take into account the uncertainty in both image and camera poses. First, our method propagates the uncertainty of the registration process to the camera poses. And second, it applies an iterative state estimation method, view-based SLAM, to accurately build the 3D object model once a loop has been closed.
Active view planning for gathering data from an unexplored 3D complex scenario is a hard and still open problem in the computer vision community. In this paper, we present a general task-oriented approach based on an information-gain maximization that easily deals with such a problem. Our approach consists of ranking a given set of possible actions, based on their task-related gains, and then executing the best-ranked action to move the required sensor.
An example of how our approach behaves is demonstrated by applying it over 3D raw data for real-time volume modelling of complex-shaped objects. Our setting includes a calibrated 3D time-of-flight (ToF) camera mounted on a 7 degrees of freedom (DoF) robotic arm. Noise in the sensor data acquisition, which is too often ignored, is here explicitly taken into account by computing an uncertainty matrix for each point, and refining this matrix each time the point is seen again. Results show that, by always choosing the most informative view, a complete model of a 3D free-form object is acquired and also that our method achieves a good compromise between speed and precision.
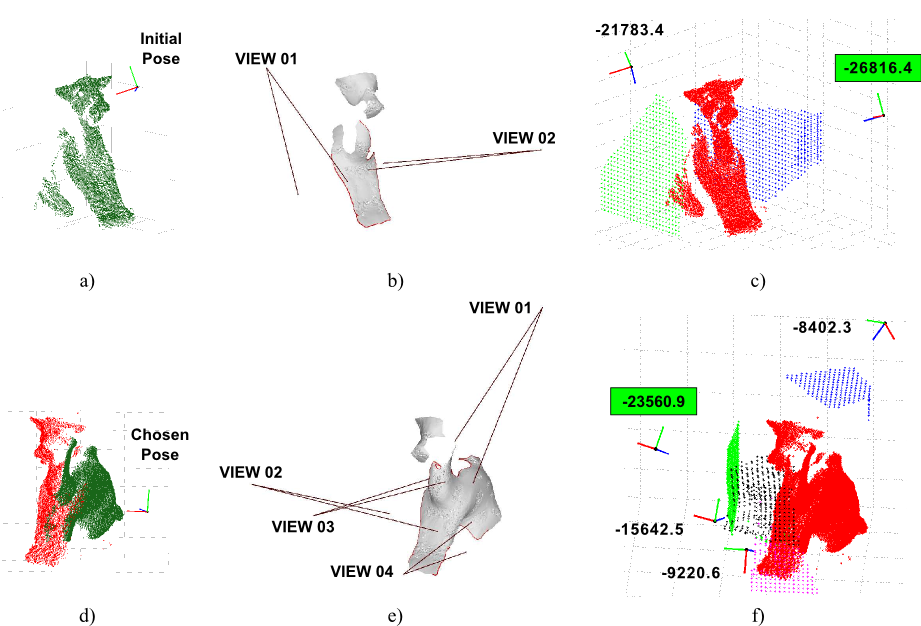
Viewpoint planning graphical representation
Related Articles
-
B. Dellen, G. Alenyà, S. Foix and C. Torras. 3D object reconstruction from Swissranger sensor data using a spring-mass model, 4th International Conference on Computer Vision Theory and Applications, 2009, Lisboa, pp. 368-372, 2009, INSTICC Press.
 Info
Info
-
S. Foix, G. Alenyà, J. Andrade-Cetto and C. Torras. Object modeling using a ToF camera under an uncertainty reduction approach, 2010 IEEE International Conference on Robotics and Automation, 2010, Anchorage, pp. 1306-1312.
Info
-
S. Foix, S. Kriegel, S. Fuchs, G. Alenyà and C. Torras. Information-gain view planning for free-form object reconstruction with a 3D ToF camera, 14th International Conference on Advanced Concepts for Intelligent Vision Systems, 2012, Brno, Czech Republic, in Advanced Concepts for Intelligent Vision Systems, Vol 7517 of Lecture Notes in Computer Science, pp. 36-47, 2012, Springer.
Info