Sònia Donaire, Júlia Borràs, Guillem Alenyà and Carme Torras
Introduction
Cloth manipulation has been mostly advancing in perception and modeling methods for cloth state estimation and grasping point detection. In comparison, less attention has been put on end-effector design. Indeed, most implementations use a parallel gripper that can only perform pinch grasps. Instead, a more versatile set of possible grasp types could ease many tasks by providing more support to certain parts of the object, as well as make feasible tasks that become very complex when executed with only pinch grasps. We present a versatile gripper design which, besides the common open-close thumb+finger(s) feature, it has a couple of reconfiguration degrees of freedom that offer, first, a wide base plane to provide support and, second, variable friction surface on the thumb tip. Our gripper can execute a versatile set of grasps that ease some complex tasks such as pick and place folded clothes or fold in the air. In addition, the variable friction mechanism enables a more robust pinch-and-slide manipulation to trace cloth edges. Our demonstrations show the gripper potential to execute a wide variety of cloth manipulation tasks.
Building instructions
3D CAD model: SolidworksModels.zip.
Assembly instructions can be found here.
Additional tips for 3D printing can be found here.
If you have any question or suggestion, don't hesitate to contact me: jborras[at]iri.upc.edu.
|
|
|---|---|
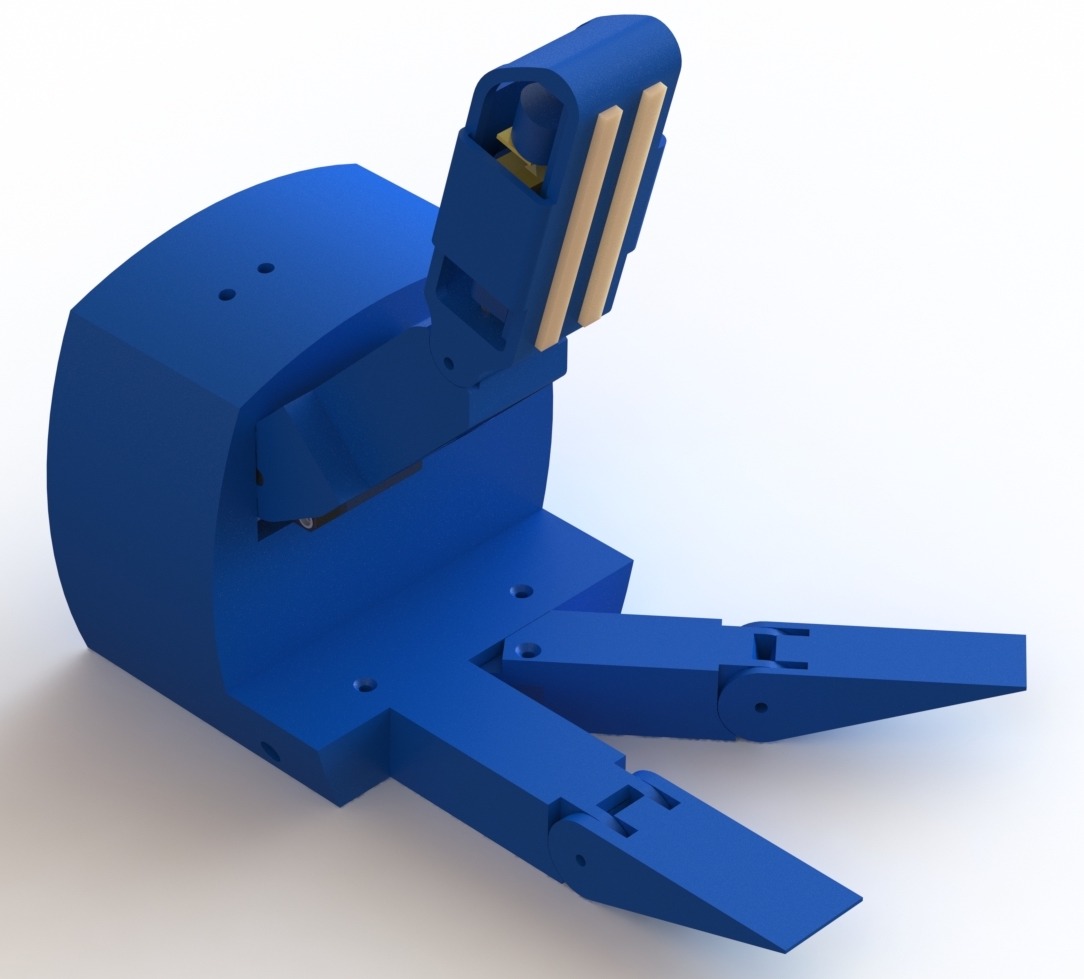
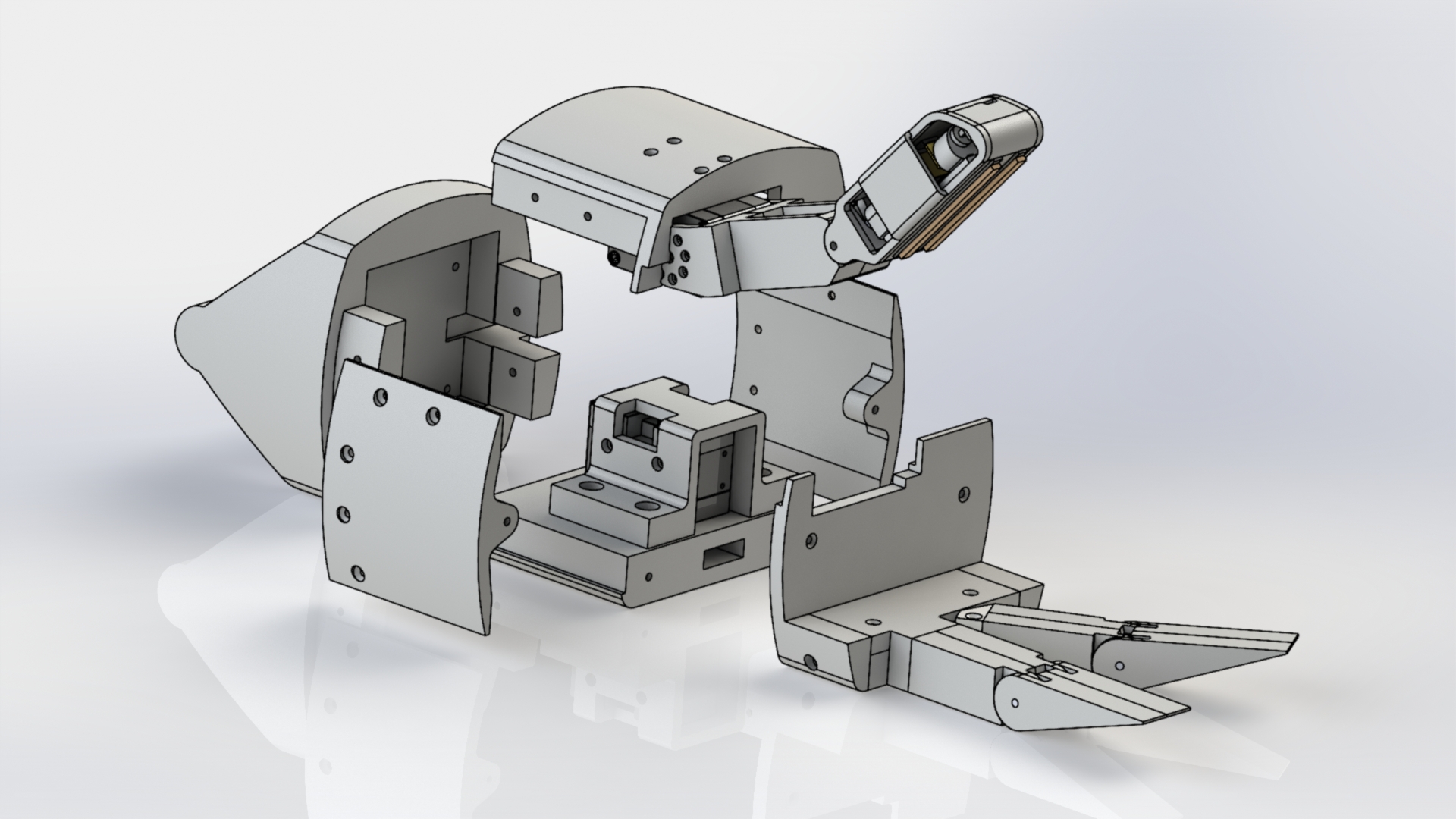
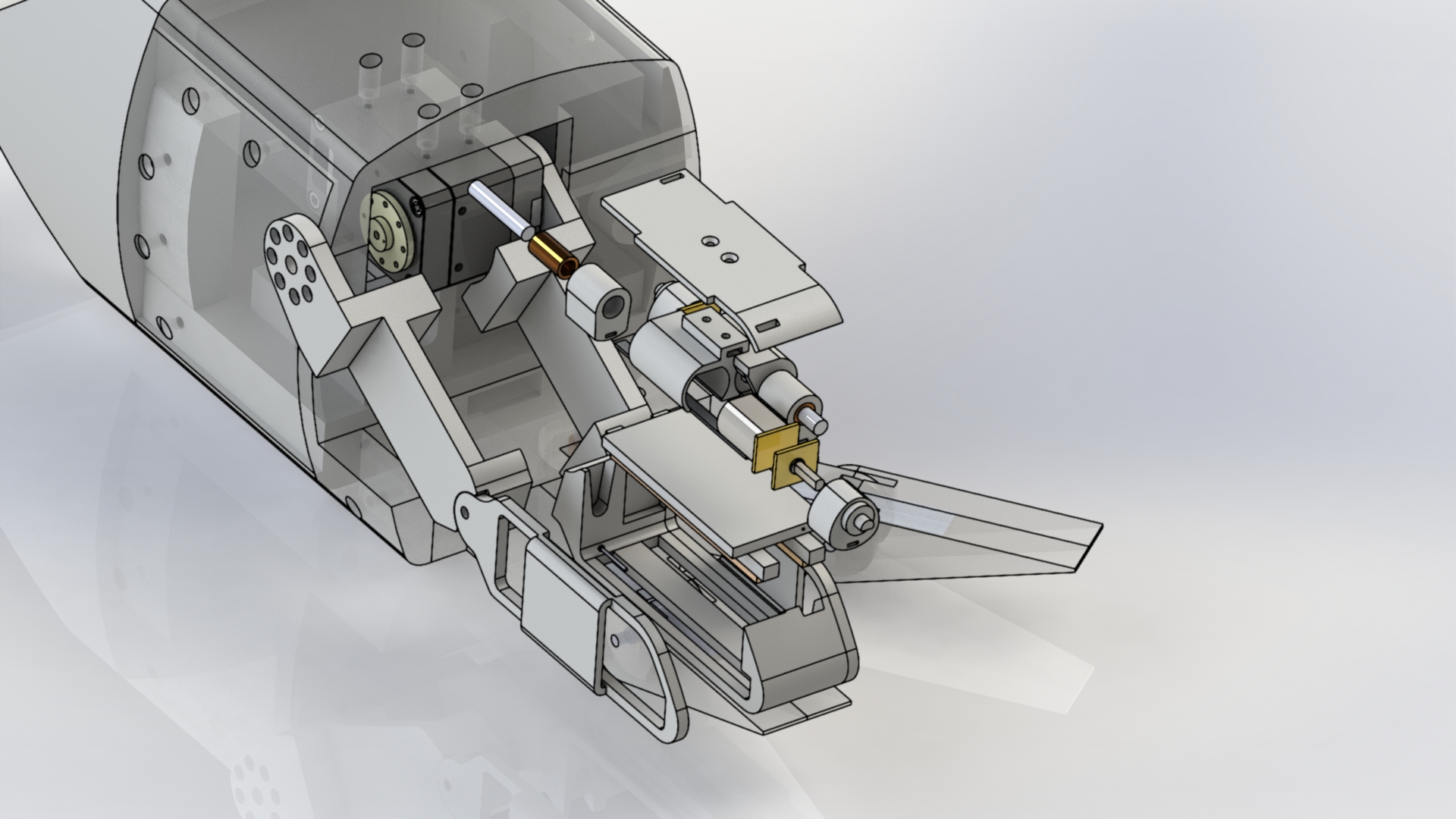
| Assembled CAD model. | Exploded CAD model - motor allocaton. |
|
|
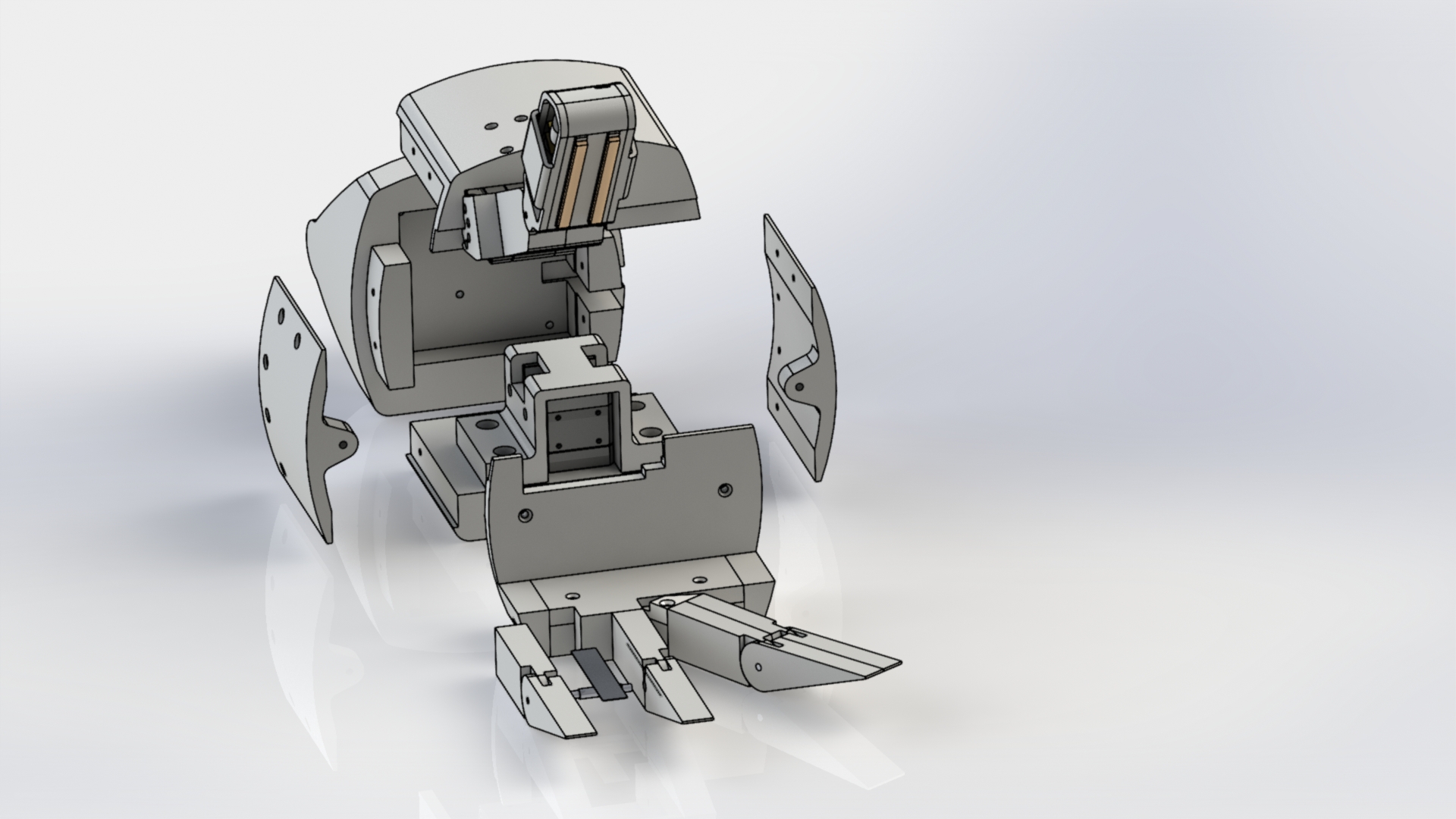
| Exploded bottom fingers CAD model. | Exploded top finger CAD model. |
Evaluation tests
|
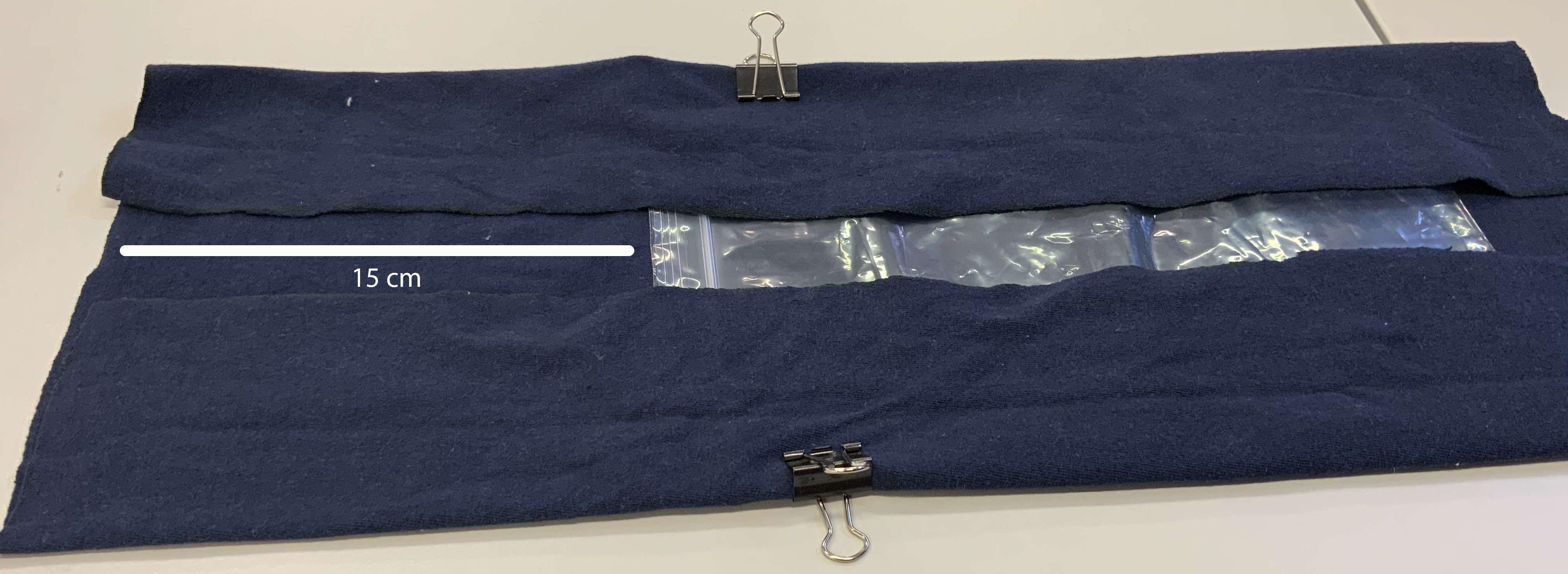
1. Test 1: Weight test. We cut pieces of different cloth materials of approx 30x40cm. We then used 2 binder paper clips to attach the plastic bag with the cloth, as shown in the figures, at 15 cm from the cloth edge. The gripper was then closed and holded in vertical for 20 seconds. We tested with 3 different cloth types.
 We repeated the task addind different weights inside the plastic bag. We had calibration weights of 125g, and we jused also euro coins. We measured several euro coins and on average, 1 euro coin is 7.5g (with differences of up to 0.09g) and a two euro coins is 8.5g (with differences of up to +-0.07g). The following table describes how we obtained the weights of the table shown at the paper
We repeated the task addind different weights inside the plastic bag. We had calibration weights of 125g, and we jused also euro coins. We measured several euro coins and on average, 1 euro coin is 7.5g (with differences of up to 0.09g) and a two euro coins is 8.5g (with differences of up to +-0.07g). The following table describes how we obtained the weights of the table shown at the paper
|


|
|---|
|
2. Test 2: Edge tracing and shaking: We performed a tracing edge manipulation, and once the corner was reached, we shaked the cloth with and without activating the friction. We repeaded trials with 4 different clothes.
|
|
3. Test 3: Pile folded T-shirts We recorded XSens motion data of the gripper performing a task of piling folded T-shirts. Four T-shirt were piled on one marked location of the table, and they were picked one by one and placed piled on another marked location of the table. T-shirts were folded as shown in the pictures. 



 Videos of all the executions are shown in the right link.
Videos of all the executions are shown in the right link.
|