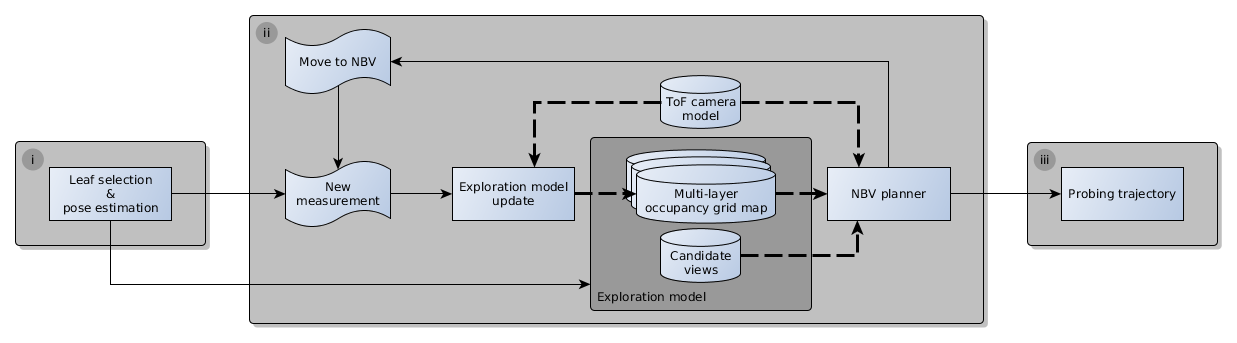
Overall Diagram
S. Foix, G. Alenyà and C. Torras
Modern plant phenotyping requires active sensing technologies and particular exploration strategies. This paper presents a general solution for plant phenotyping composed of a robot manipulator carrying a 3D sensor and a measuring tool in its end-effector. A novel definition of the task and a 3D space representation allows to evaluate different sensor views and choose the one that potentially obtains more information. A new method is proposed for actively exploring a 3D region of space with the aim of localizing areas of interest for manipulation tasks over plants. Our method uses a multi-layer occupancy grid map for encoding an exploration route that, thanks to a multiple-view estimator and a maximum-information-gain gathering approach, incrementally provides a better understanding of the scene until the task termination criterion is reached. This approach is designed to be applicable to any task entailing 3D object exploration where some previous knowledge of its general shape is available. Its suitability is demonstrated here for an eye-in-hand arm configuration in a leaf probing application.
Video
|
The aim of this video is to show how behaves the system described in the above graphical block diagram. |
G. Alenyà , B. Dellen, S. Foix, and C. Torras
We present a novel method for the robotized probing of plant leaves using Time-of-Flight (ToF) sensors. Plant images are segmented into surface patches by combining a segmentation of the infrared intensity image, provided by the ToF camera, with quadratic surface fitting using ToF depth data. Leaf models are fitted to the boundaries of the segments and used to determine probing points and to evaluate the suitability of leaves for being sampled. The robustness of the approach is evaluated by repeatedly placing an especially developed, robot-mounted spad meter on the probing points which are extracted in an automatic manner. The number of successful chlorophyll measurements is counted, and the total time for processing the visual data and actually probing the plant with the robot is measured for each trial. In case of failure, the underlying causes are determined and reported, allowing a better assessment of the applicability of the method in real scenarios.
Related Articles
-
S. Foix, G. Alenyà and C. Torras. 3D Sensor planning framework for leaf probing, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015, Hamburg, pp. 6501-6506.
 Info
Info
 PDF
PDF
-
G. Alenyà, B. Dellen, S. Foix and C. Torras. Robotized plant probing: Leaf segmentation utilizing time-of-fligth data, IEEE Robotics and Automation Magazine, 20(3): 50-59, 2013.
Info
PDF
-
G. Alenyà, B. Dellen and C. Torras. 3D modelling of leaves from color and ToF data for robotized plant measuring, 2011 IEEE International Conference on Robotics and Automation, 2011, Shanghai, pp. 3408-3414.
Info
PDF
-
S. Foix, S. Kriegel, S. Fuchs, G. Alenyà and C. Torras. Information-gain view planning for free-form object reconstruction with a 3D ToF camera, 14th International Conference on Advanced Concepts for Intelligent Vision Systems, 2012, Brno, Czech Republic, in Advanced Concepts for Intelligent Vision Systems, Vol 7517 of Lecture Notes in Computer Science, pp. 36-47, 2012, Springer.
Info
PDF