
Warning: This pages are still under construction.
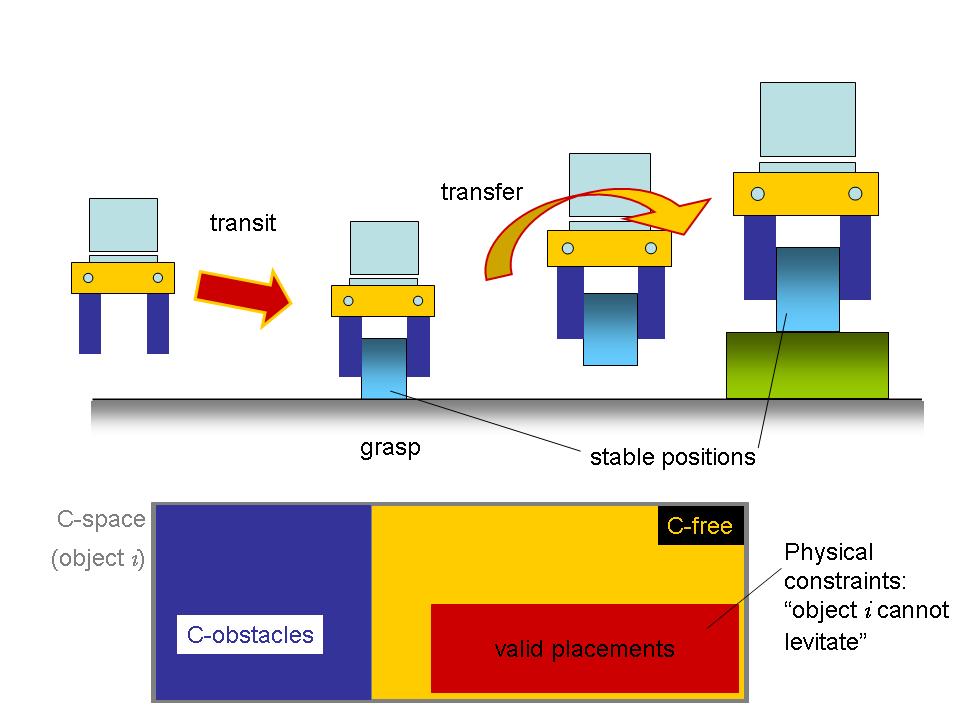
Manipulation of rigid objects means basically changing their placement. The object itself does not experiment any other change. The planning algorithms described in the document below assume that this position change is the only significant issue in manipulation and they are only concerned about the absence of collisions along the trajectory (both of the robotic manipulator and the transfered object). Validity of the different placements of the object (initial and goal as well as possible intermediate positions) can be already captured in the definition of its configuration space: not only obstructing objects in the environment can be treated as obstacles, but also areas that represent a potential damage for the object. Furthermore, environmental constraints do also include stability of the object under gravitation.
Nonetheless, it should be kept in mind that even for objects that do not experiment any change in their shape, manipulation goes far beyond this restricted view, it is not identical with mere pick and place. A robot that puts dishes and cutlery on a table may not worry about the time it takes to perform these operations (as long as there are no guests waiting impatienly), but if no dynamics is included in planning it will probably fail to handle apropriately a hammer to ram a nail into the wall. Furthermore, the manipulation of this very same hammer will be quite different if it is used on a human knee to test the patient's reaction capabilities, or if it is just put back in the toolbox. Efforts have been devoted to link the basic geometric planning level to the semantically significant task level planning, and some of them are described here. However, this does not suffice for hammering a nail, links have also to be established between abstract task planning and basic but physically more descriptive levels, like kynodynamic planning.
Geometric manipulation planning of rigid objects is, however, a sufficiently involved problem, specially in its more intrincate instances as redundant manipulators, multi-arm manipulation, and the like, so as to deserve a brief survey capturing its most salient features and the existing literature. Please click on the link below to download a file on this subject.
Brief Survey on Model-Based Manipulation Planning of Rigid Objects
Last modified on wednesday, 12 March, 2008