INTERACTIVE COURSE ON EKF AND
SLAM NEW
This course is intended for beginners on Extended Kalman Filter and
Simultaneous Localization And Mapping.
It is based on the principle:
"we make
programs that work; we try to understand later".
We build Extended Kalman filters and SLAM programs from scratch.
They
work, and we are happy. See two snapshots:
EKF -->
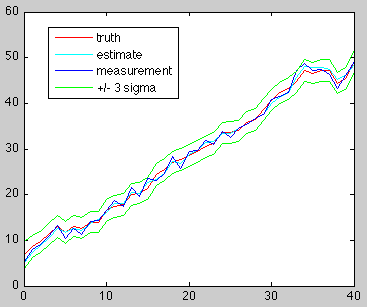
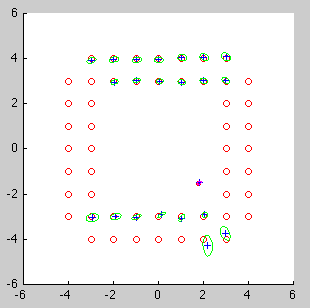
<-- SLAM
The course consists on a series of videos (8h30 total time), and
some
supporting files.
It requires very basic knowledge of the Matlab syntax. It mostly
works
on Octave too, except possibly for some graphics functionalities and
some symbolic computations.
To take the best profit of the course, I strongly recommend you
follow
the following procedure:
1. Open the video file and Matlab. Place them on
the
both sides of the screen (you can use two
screens if you prefer).
2. Play the video. Type in your editor EXACTLY
what
is being typed
on the video. Follow my comments and suggestions.
3. If you do not
understand anything, don't worry: keep on going and things will come
up
later.
4. Execute the files you typed and see how your
work
produces amazing results.
5. Use the provided m-files to help fixing some
bugs you may make.
The videos advance at a very slow pace. I recommend you adopt
an
active
actitude
of
actually
typing
code, otherwise you will soon get
bored. If
you type, you will learn very quickly.
Part I: Kalman Filter (KF) and Extended Kalman Filter (EKF). Total
time: 3h 30min.
Download
the video with the introduction to KF (44 min, 24 MB).
Download
the video with an example of a one-dimensional KF (51 min, 28 MB).
Download
the video with the introduction to EKF (10 min, 6 MB).
Download
the video with an example of a two-dimensional tracker (1h 45 min,
57
MB).
Download
the support m-files.
Part II: 2D SLAM based on the EKF. Total time: 5h 00 min.
Download
the PDF with a brief introduction to the theoretical background of
EKF-SLAM.
Download
the video with the introduction to SLAM (54 min, 18 MB).
Download
the video with the elementary SLAM observation functions (34 min, 19
MB).
Download
the video with the robot motion function (35 min, 14 MB).
Download
the video with main SLAM program (2h 53 min, 93 MB).
Download
the video with an interesting bug correction (2 min, 1 MB).
Download
the support m-files and pdf-file.