|
Griffis-Duffy.world File Reference Detailed Description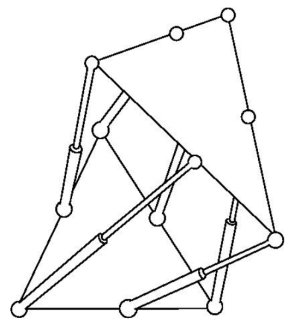
IntroductionFor a general Stewart-Gough platform, once the lengths of all legs are fixed, the entire structure becomes rigid (although the same lengths may be compatible with up to 40 endplate locations). In the special case above, however, any choice for such lengths makes the endplate mobile with one degree-of-freedom [Husty and Karger 2000]. This linkage is actually a sub-case of the so-called Griffis-Duffy platform, a parallel platform invented by M. Griffis and J. Duffy [Griffis and Duffy 1993], whose special geometry allows a closed-form solution for its direct kinematic problem, with the advantage of having all of its spherical joints separated (which facilitates its physical construction). GeometryIn [Griffis and Duffy 1993] the authors propose two types of mechanisms, referred to as the "midline to apex" and "apex to apex" embodiements. The linkage of this benchmark is a special case of the "midline to apex" embodiement. Specifically, the base and platform bodies must be equilateral triangles, and every leg connects one vertex of a triangle with an edge midpoint of the other triangle, as shown in the figure above. Provided the mechanism can actually be assembled, any leg lengths will let the one-dimensional self-motion occur. The geometric parameters of this parallel platform are (the leg lengths computed by randomly placing the top platform):
ProcessThis example is treated following this steps (from the main CuikSuite folder):
If you want to trace the red point on the platform execute:
StatisticsCharacteristics of the problems:
Here you have the statistics about the execution (on an Intel Core i7 at 2.9 Ghz).
ResultsBy changing the colors of the two plotted curbes you should get something like the figure below from the first sequence of commands in the process section. 
The result of second set of commands of the process section gives you a plot as (actually this is just a snapshot as the mechanism will move tracing the curbe). 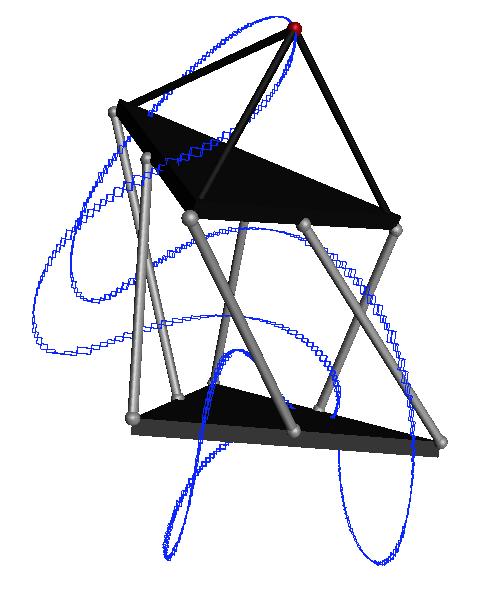
References
Definition in file Griffis-Duffy.world. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Follow us!