|
Star3.world File Reference Detailed Description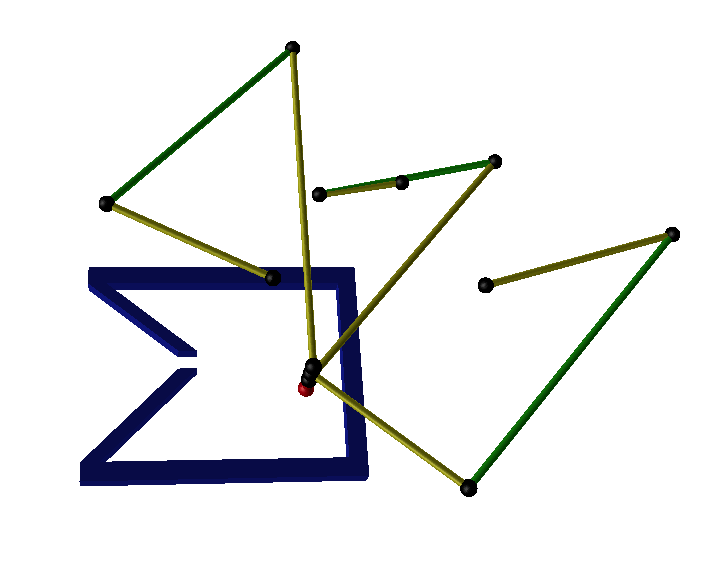
A star (or spider) planar mechanism with 3 legs and 3 links per legs. This is used for path planning. Actually we used this same file for different experiments by commenting/uncommenting parts of the file (basically the obstacles). Note that different experiments (obstacles!) also require different start/goal points in the .samples or .dof files (the first is used for MATRIX based representations and the second when using DOFs). Observe that the mechanism and the obstacles are at different planes and that only the red rod at the central point of the mechanism can actually touch the obstacles. Moreover, self-collisions (collisions between the links forming the mechanisms) are not considered. We used this example in our WAFR-11, IJRR-12, and ISSR-12 papers with different obstacle settings and solved using different planners. The key data for this problem is:
This example is treated following these steps (from the main CuikSuite folder):
Definition in file Star3.world. |
Follow us!