|
baxter_box.world File Reference Detailed Description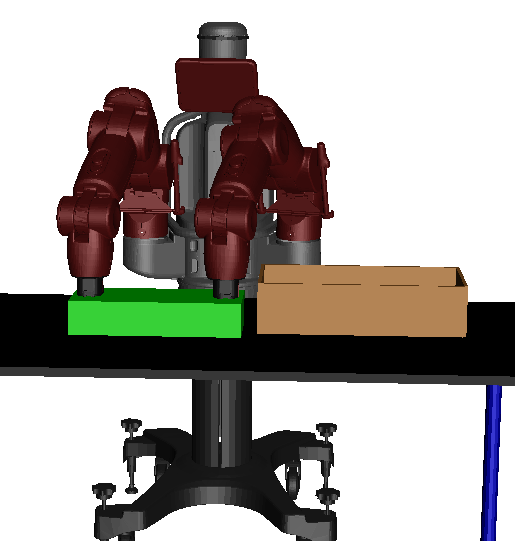
We take the Baxter file imported from the URDF and set up a planning task were the robot has to take a green box with the two arms and put in in a larger brown box that is on a table. The green box is moved using the two arms, which defines a kinematic loop (i.e., an implicitly defined configuration space). This planning problem can be solved executing
and the resulting path can be visualised executing
The raw path is typically yerked. This can be solved executing
and the smoothed path can be visualized executing
Note the screen is not part of the kinematic loop and, thus this is an example of how we can plan with hybrid systems (systems with kinmeatically-constrained and unconstrained degrees of freedom). Definition in file baxter_box.world. |
Follow us!