|
cuikrrtstar.c File Reference Detailed Description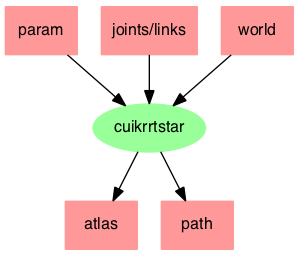
Defines an otpimal RRT on a manifold following the RRT* proposed by
but adapted to operate on manifolds. In this case sample is done in the ambient space and the connections between points on the manifold is done using the method by
The RRT* is different from other RRT's in that the tree construction is not stopped when the goal is reached, but the path is continuously improved. In the limit the optimal path is returned. Definition in file cuikrrtstar.c.
Function Documentation
Main body of the cuikrrtstar application. Defines a RRT* on a manifold combining the works by
Use:
where
The .world extension is optional.
Definition at line 96 of file cuikrrtstar.c. References CreateFileName(), CS_WD_DELETE, CS_WD_EXT, CS_WD_GET_NUM_SYSTEM_VARS, CS_WD_INIT, CT_BI_RRT, CT_MAX_PLANNING_ITERATIONS, CT_RRT_GRAPH, DeleteAtlasRRTStatistics(), DeleteAverages(), DeleteFileName(), DeleteParameters(), DeleteRRT(), DeleteSamples(), Error(), FALSE, GET_RRT_STATISTICS, GetFileFullName(), GetParameter(), GetRRTNumNodes(), HEURISTIC_RRT_STAR, InitAverages(), InitParametersFromFile(), InitRRT(), InitRRTStatistics(), NEW, NewSuccesfulExperiment(), NO_UINT, ONE_TREE, PARAM_EXT, PrintAtlasRRTStatistics(), PrintAverages(), PrintAveragesHeader(), PrintParameters(), randomSet(), ReadTwoSamples(), RRT_EXT, RRT_VERBOSE, RRTMemSize(), RRTstar(), RRTSTAR_SYMMETRIC_COST, RRTSTAR_UPDATE_COSTS, SaveRRT(), SaveSamples(), TRUE, TWO_TREES_WITH_SWAP, and Warning(). | ||||||||||||||||||||||||
Follow us!