|
Serial6R Directory Reference Detailed Description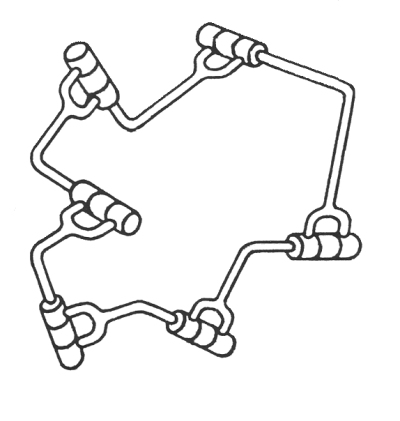
IntroductionA 6R manipulator is a chain of seven links L0,L1, ..., L6, where Li is connected to Li+1 with a revolute joint. Link L0 is the "ground" and link L6 is the "end effector" (usually a gripper). The problem is to compute which joint angles are required to place the end effector at a given position and orientation in 3-space. Note that, since the ground and the end effector have fixed relative positions, they can be viewed as a single rigid body. Thus, the inverse kinematic problem is equivalent to finding all possible configurations of a general 6R loop like the one depicted above. For more than a decade this was one of the principal problems of Robot Kinematics. The first efficient solution is due to [Raghavan and Roth 1993] who obtained a minimum-degree resultant for this problem. Using this technique, the problem can be solved in a few milliseconds on a standard computer [Manocha and Canny 1994]. Although the CUIK solution is slower, it is less affected by the presence of equation singularities, and it can deal with paradoxical 6R loops with positive-dimensional solution spaces. GeometryThe usual way to parametrize a serial chain is giving the Denavit-Hartenberg parameters. In this convention, three parameters ( 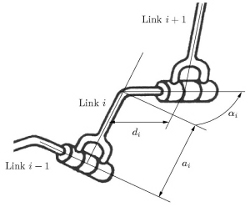
Denavit-Hartenberg parameters relating link i and link i+1 FormulationsIn this directory the following 6R-chain formulations are provided:
Please, check the individual files for the Denavit-Hartenberg in each case. References
| ||||||||||||||||||||||||||
 ) relate the frame of reference attached to link
) relate the frame of reference attached to link  with that attached to link
with that attached to link  . See the figure below for an interpretation of these parameters.
. See the figure below for an interpretation of these parameters.
Follow us!