|
DeltaManipulator Directory Reference Detailed Description
IntroductionThe Delta parallel manipulator is a 3 degrees-of-freedom parallel platform designed by Reymond Clavel. The key idea in the design is the use of a four bar loop in each leg. Note that the design is very similar to that of the Maryland Manipulator but here spherical joints are used to connect the four bars forming the upper part of the leg instead of revolute joints. The result is a simpler formulation since a couple of spherical-spherical composite joints generate less variables and constraints that four bars connected with revolute joints (even taking into account the simplifications due to the fact that the axes of the revolute joints are parallel). Note that using spherical joints, the four bars forming the upper part of the legs are not forced to be coplanar, as it is the case with the Maryland manipulator. The consequence is that for the same inputs, the Delta formulation give more solutions that the Maryland one. In some practical implementations (see for instance the Delta Haptic Device) springs between the two long bars in the upper limb for each leg are used to force the planar configuration. See [Bonev, 2001] for a complete description and analysis of this mechanism and its applications. GeometryThree identical limbs connect the base and the platform. Each leg is formed by a lower arm and an upper arm. The upper upper is formed by a couple of spherical-spherical pairs that connect the lower arm and the platform. In the simplest possible version of this mechanism, the platform parameters are the lengths of the limbs and the the anchor points of the legs at the base/platform. The axis of the revolute joints connecting the base and the legs can be taken as tangent to the circunference inscribing the triangle formed by the anchor points. ProcessThis example is treated following this steps (from the main CuikSuite folder):
StatisticsCharacteristics of the problems:
Here you have the statistics about the execution (on an Intel Core i7 at 2.9 Ghz).
ResultsThis is one of the configurations that you will obtain: 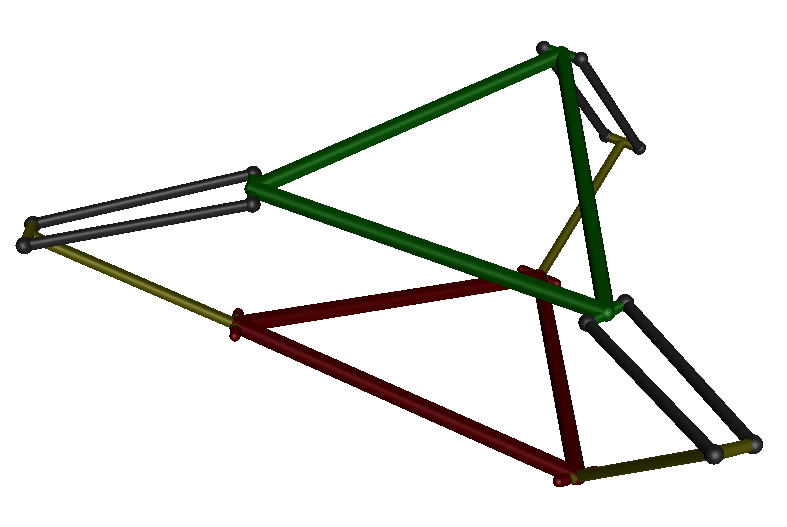
References
| ||||||||||||||||||||||||
Follow us!