|
Torus Directory Reference Detailed Description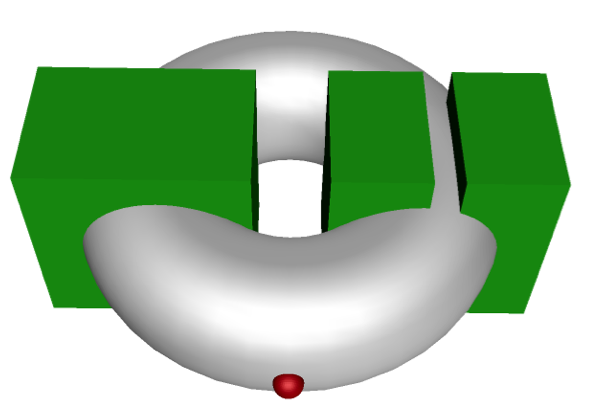
A ball moving on a torus with many obstacles. We use this benchmark to test path planning algorithms since, due to its simplicity it is straightforward to visualize the results. We performed different experiments on this problem:
| ||||||||||||||
Follow us!