|
free_flying.tens File Reference Detailed Description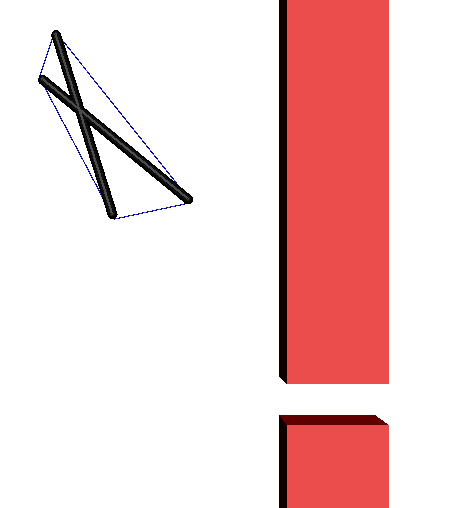
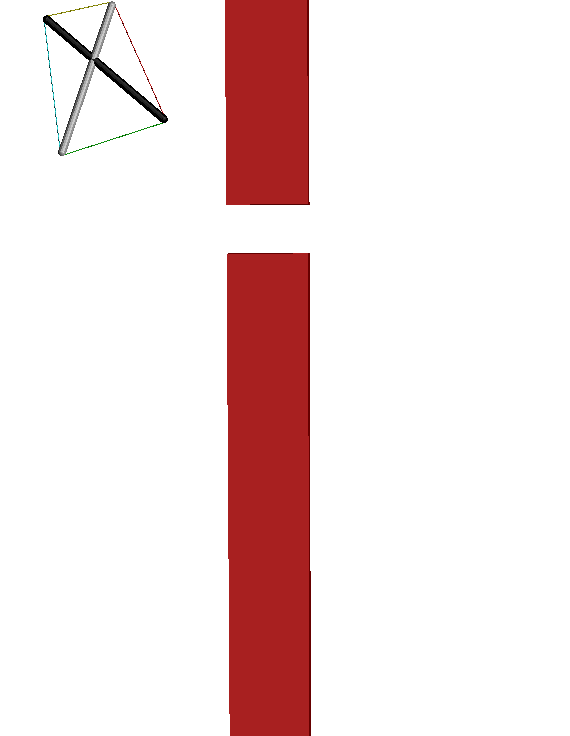
An example to show that we can also model free-flying tensegrity structures. You can manipulate this structure executing
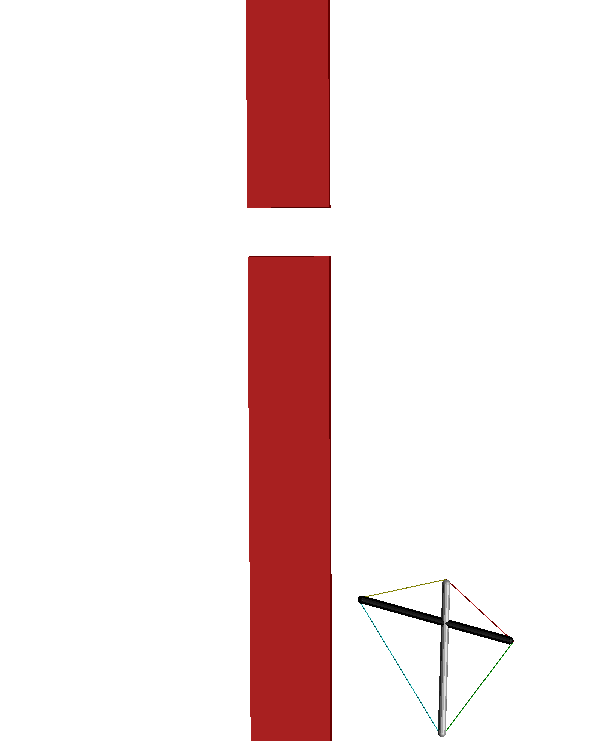
The structure has to cross the narrow gap between the red walls. Thus, the configurations to connect are:
To solve this planning problem execute
smooth the output path
The first smoothing process is a shortcut method to reduce the path length and the second reduces the control effort departing from the output of the first process. This process is more effective than directly reducing the path effort on the original path: the shortcut path is very effective and it returns a path that is not far from the minimum control effort path (recall that if all elements in the tensegrity are elastic, the control effort and the path length are the same). Finally, we can visualize the path
Note that despite the apparent simplicity of the problem, the search space is large and, thus, the planning can take some time. The execution time significantly varies between different executions, which is a well-known characteristic of probabilistic planners in the presence of narrow corridors, as it is the case of this example. Definition in file free_flying.tens. |
Follow us!