|
pr2_pitcher3.world File Reference Detailed Description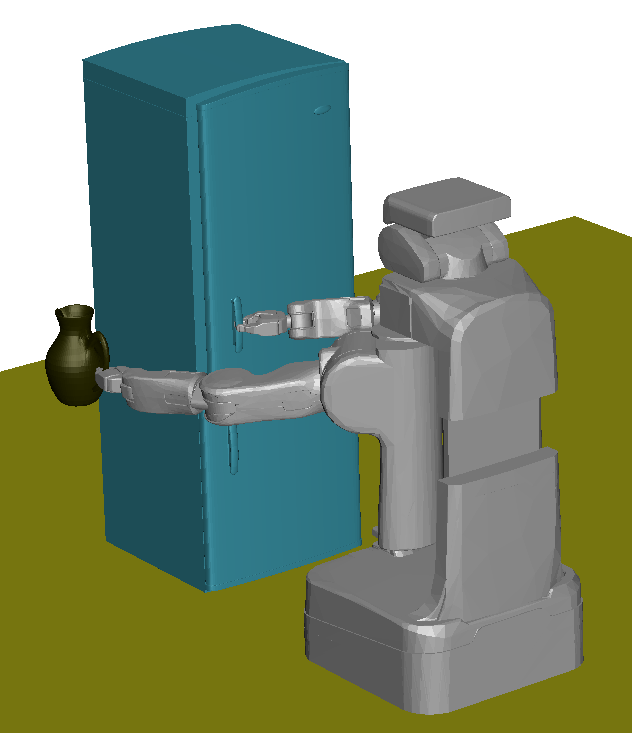
The PR2 robot by Willow Garage putting a sangria pitcher in a fridge. The difference with respect to pr2_pitcher.world is that here the orientation of the pitcher is fixed, but the gripper in the door can rotate (about the door handle). Thus the two examples have the same number of degrees of freedom. This is an example used in the TRO-13 paper. The key data for this problem are:
This example is treated following this steps (from the main CuikSuite folder):
Definition in file pr2_pitcher3.world. |
Follow us!