|
tro2.world File Reference Detailed Description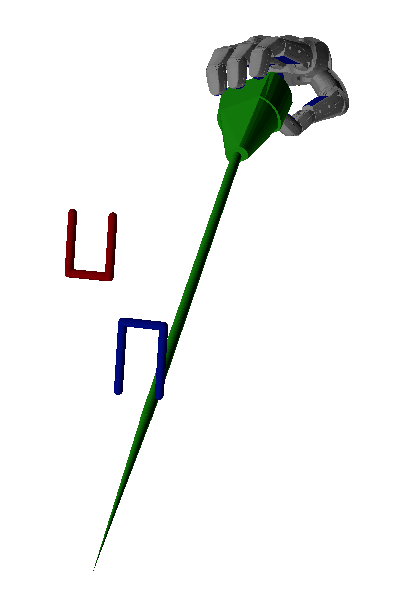
The DLR-II robot hand hoding a needle with 3 fingers. This example was used for path planning in the TRO-13 paper. The difference with respect tro.world is that the hand can rotate at the wrist (in tro.world the palm is fixed). Thus, here we have one degree of freedom more. The key data for this problem are:
This example is treated following this steps (from the main CuikSuite folder):
Definition in file tro2.world. |
Follow us!