Aims and Objectives
|
||||||||
 Josep Camps |
 Patrick Grosch |
 Julia Borràs
|
 Aleix Rull |
 Abhijit Makhal
 Federico Thomas
|
 Aitor Ramírez and
Daniel González
|
 Agustí
|
|
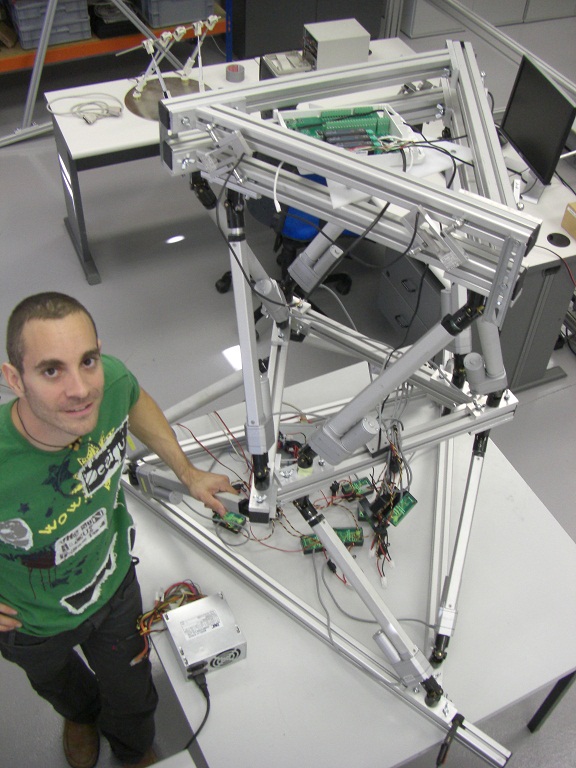
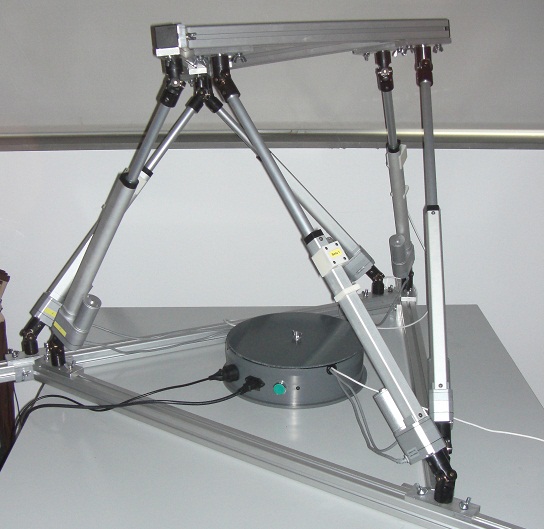
Reconfigurable Gough-Stewart platforms |
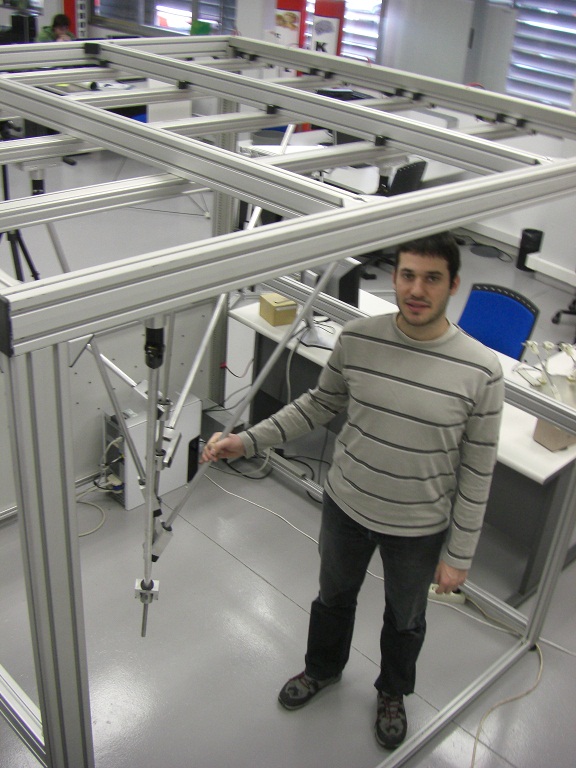
Reconfigurable hexaglides and pentaglides |
|
These platforms consists of six extensible legs connecting a moving platform to a fixed base. We avoid the use of multiple spherical joints (that is, spherical joints sharing the same center) without loosing the properties of the celebrated octahedral architecture.
|
These platforms have fixed-length
legs whose base attachments can be moved along guides.
They can be manually reconfigured to have a 5 or a
6-dof-platform. |
 |
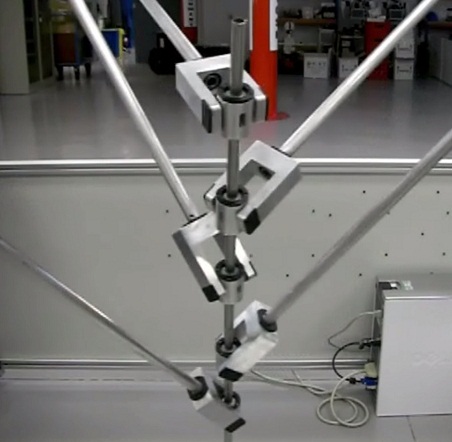 |
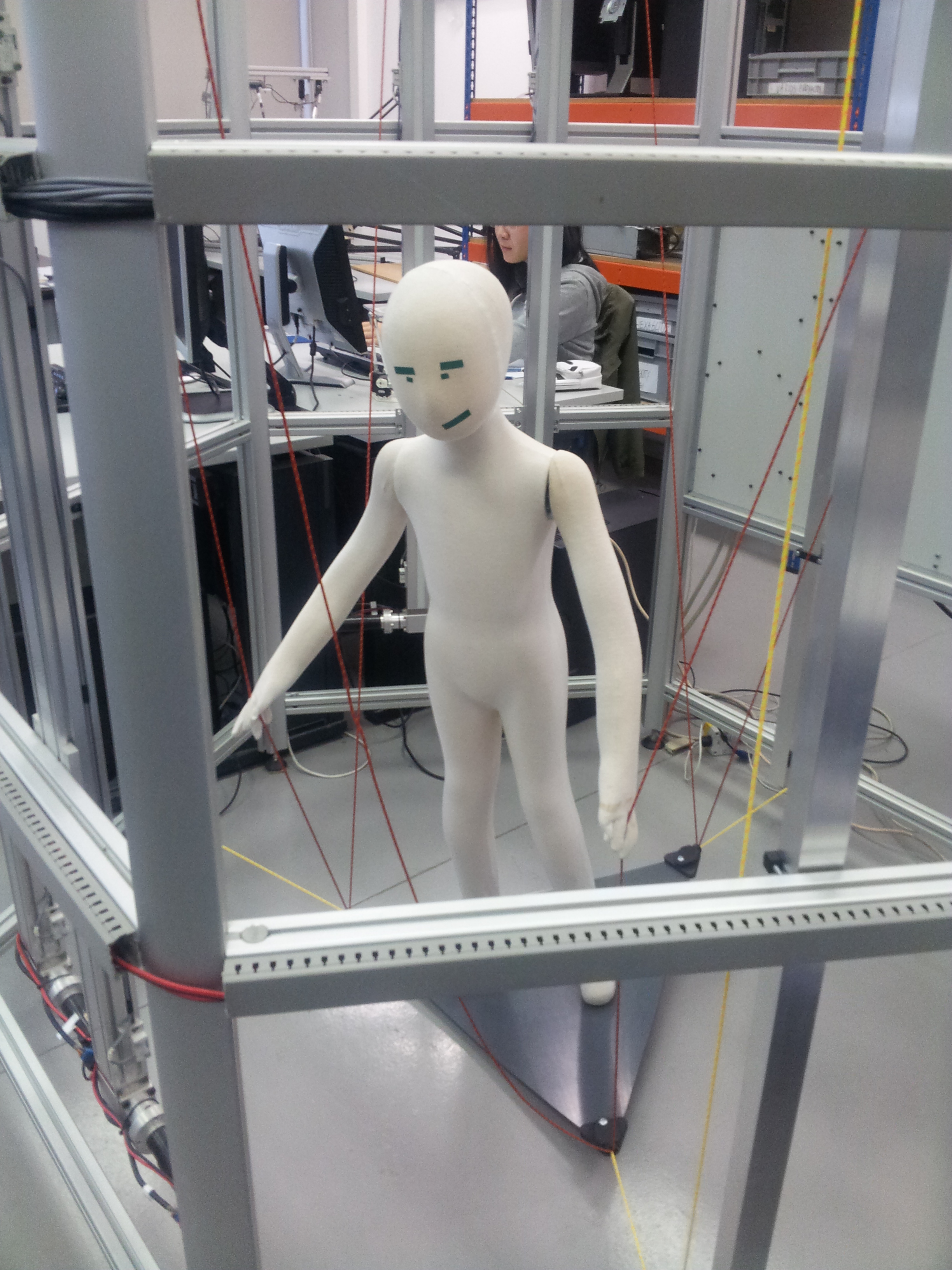
Gough-Stewart platforms with lockable joints
|
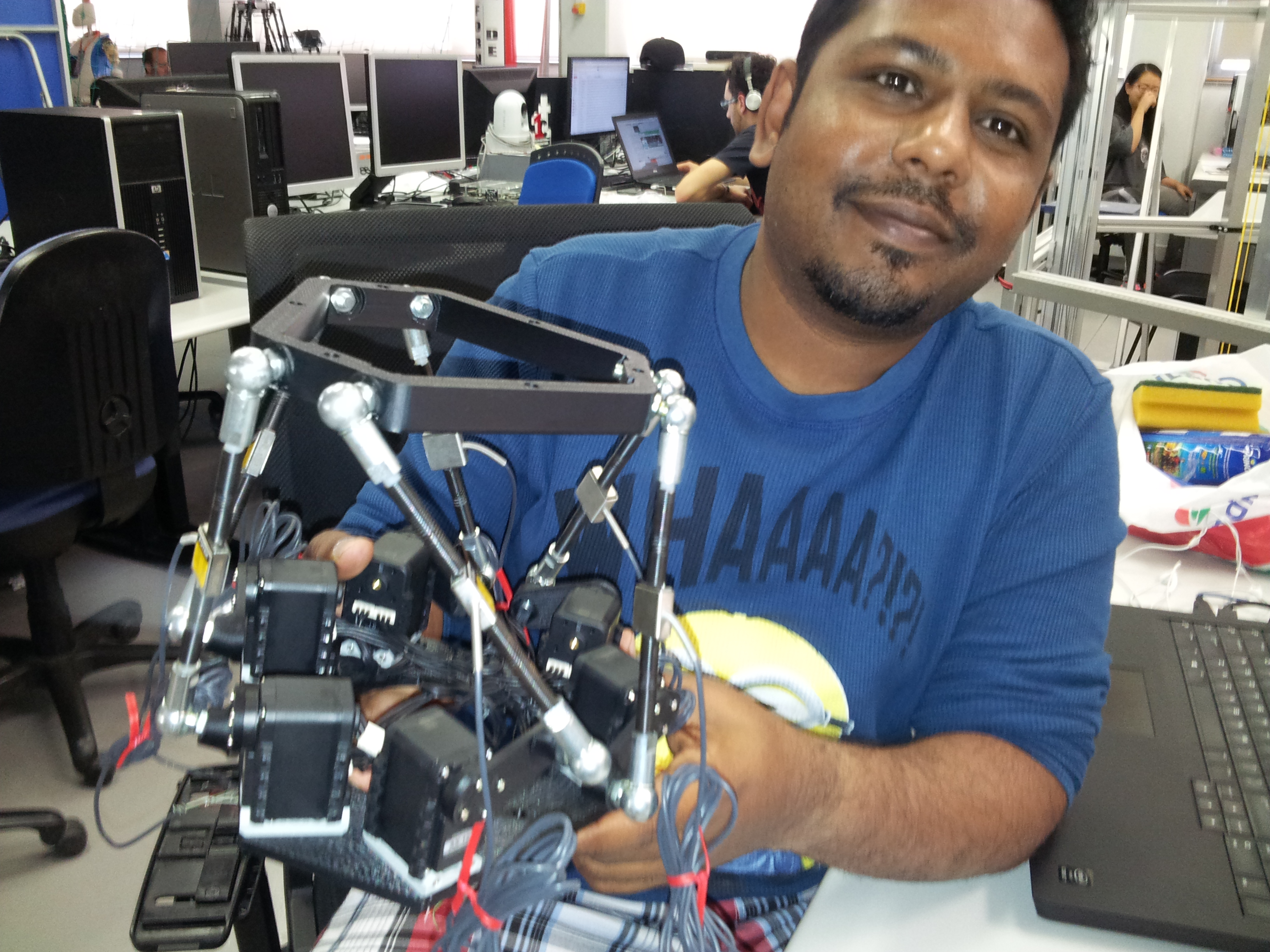
Wrench sensors based on in-parallel structures
|
| These
are reconfigurable parallel robots consisting of a
fixed base and a moving platform connected by serial
chains having RRPS (Revolute-Revolute-
Prismatic-Spherical) topology. Only the prismatic
joint is actuated and the first revolute joint in the
chain can be locked or released online. The
introduction of these lockable joints allow the
prismatic actuators to maneuver to approximate
6-DoFmotions for the moving platform. |
Different
in-parallel
structures have been conceived as six-component force
sensors. Their fixed-length legs are connected
to the base and the platform through ball-and-socket
joints. |
 |
 |
Federico
Thomas
IRI (CSIC-UPC)
Llorens Artigas 4-6, 2 planta
08028 Barcelona, SPAIN
fthomas at iri dot upc dot es
