Research Project
MVOD: Medición eficiente de volúmenes de objetos deformables con cámaras rentables
Type
CSIC Project
Start Date
01/03/2012
End Date
31/03/2014
Project Code
201250E028
Staff
-
-
Rojas, Ivan Andres
Support
Project Description
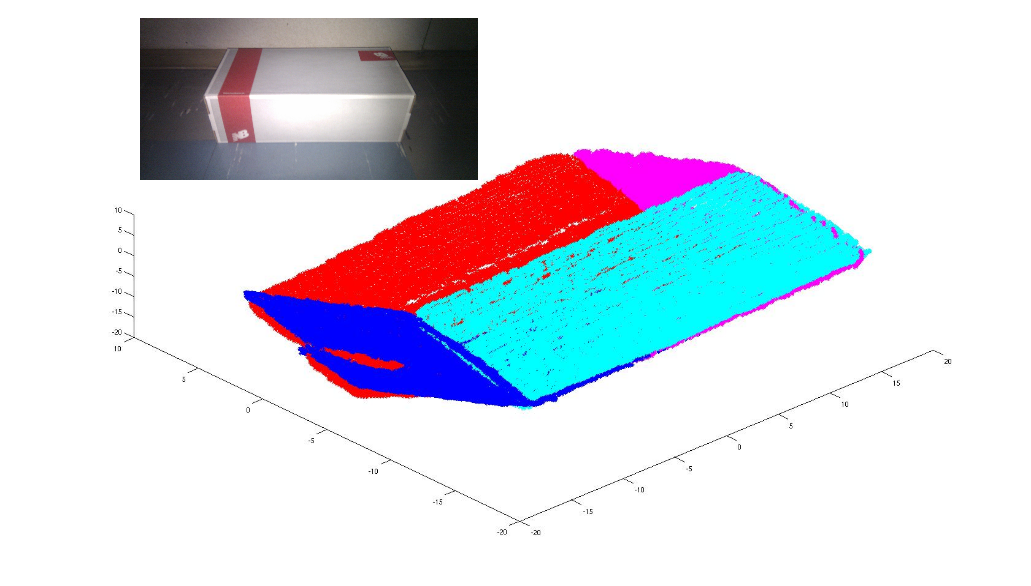
The measurement of object volumes is of large importance in many sectors of industry, including agriculture, transportation, production, and forestry. In this project, we investigate the feasibility of using low-cost depth-sensing devices such as the Kinect camera for volume measurement of objects of medium size, e.g., parcels and other domestic objects, including the deformable objects. Using a fixed set-up, depth data is acquired from different view points and merged. Volumes are carved using a volume intersection approach, which is computationally simple, and, most importantly, model-free. Particular attention is given to the characteristic properties of the data acquired with the Kinect, such as the limited resolution, among other typical contingencies. The performance of the method is evaluated using ground-truth volumes of a benchmark data set of selected objects, and volume-measurement errors are estimated. The computational efficiency of the applied algorithms for volume measurement represents another important aspect of the project, since the computation speed largely determines how many objects can be measured during a day, which should be as large as possible.
 Abstract
Abstract Info
Info PDF
PDF

Follow us!