Program at a glance
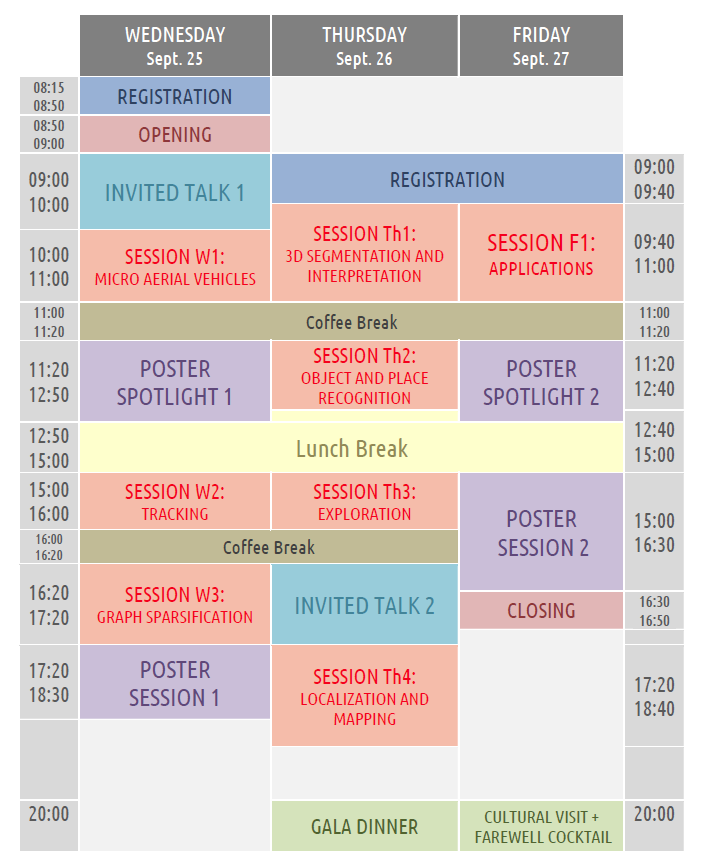
Conference Program
WEDNESDAY, September 25
- 08:15-08:50 REGISTRATION
- 08:50-09:00 OPENING
- 09:00-10:00 INVITED TALK 1 CHAIR: Juan Andrade-Cetto / COCHAIR: Udo Frese
- Jamie Paik
Addressing soft robotics challenges with Robogamis
- 10:00-11:00 MICRO AERIAL VEHICLES CHAIR: Andreas Zell / COCHAIR: Andreas Masselli
-
[10:00-10:20] Chiara Troiani, Stefano Al Zanati, Agostino Martinelli
A 3 points vision based approach for MAV localization in GPS denied environments
- [10:20-10:40] Matthias Nieuwenhuisen, David Droeschel, Johannes Schneider, Dirk Holz, Thomas Läbe, Sven Behnke
Multimodal obstacle detection and collision avoidance for micro aerial vehicles
- [10:40-11:00] Chiara Troiani, Agostino Martinelli, Christian Laugier, Davide Scaramuzza
1-point-based monocular motion estimation for computationally-limited micro aerial vehicles
- 11:00-11:20 COFFEE BREAK
- 11:20-12:50 POSTER SPOTLIGHT 1 CHAIR: Adam Borkowski / COCHAIR: Udo Frese
- [Poster #01] Volker Grabe, Martin Riedel, Heinrich H. Buelthoff, Paolo Robuffo Giordano, Antonio Franchi
The TeleKyb framework for a modular and extendible ROS-based quadrotor control
- [Poster #02] Jacobo Jiménez Lugo, Andreas Masselli, Andreas Zell
Following a quadrotor with another quadrotor using onboard vision
- [Poster #03] Abubakar Surajo Imam, Robert Bicker
Significance of wind disturbance on a quadrotor helicopter in hover flight
- [Poster #04] Yue Wang, Rong Xiong, Qianshan Li, Shoudong Huang
Kullback-Leibler Divergence based graph pruning in robotic feature mapping
- [Poster #05] Raoul Hoffmann, David Weikersdorfer, Jorg Conradt
Autonomous indoor exploration with an event-based visual SLAM system
- [Poster #06] B. Cevdet Akdeniz, H. Işıl Bozma
Local terrain mapping via 3D laser based bubble surfaces
- [Poster #07] Christian Mandel, Oliver Birbach
Localization in urban environments by matching sensor data to map information
- [Poster #08] Jan Hartmann, Jan Helge Klüssendorff, Erik Maehle
A comparison of feature descriptors for visual SLAM
- [Poster #09] István Gozse, Alexandros Soumelidis, Bálint Vanek
Realization of an optical indoor positioning system based on TFT technology
- [Poster #10] Francesco Amigoni, Alberto Quattrini Li, Dirk Holz
Evaluating the Impact of perception and decision timing on autonomous robotic exploration
- [Poster #11] Dario Lodi Rizzini, Stefano Caselli
A scan matching method based on the area overlap of star-shaped polygons
- [Poster #12] Johan Ekekrantz, Andrzej Pronobis, John Folkesson, Patric Jensfelt
Adaptive iterative closest keypoint
- [Poster #13] Mathieu Dubois, Paola K. Rozo, Alexander Gepperth, Fabio A. González O., David Filliat
A comparison of geometric and energy-based point cloud semantic segmentation methods
- [Poster #14] Andreas Hertle, Christian Dornhege
Efficient extensible path planning on 3D terrain using behavior modules
- [Poster #15] Sebastian A. Scherer, Alina Kloss, Andreas Zell
Loop closure detection using depth images
- [Poster #16] Karel Košnar, Vojtěch Vonásek, Miroslav Kulich, Libor Přeučil
Comparison of shape matching techniques for place recognition
- [Poster #17] Luis Felipe Posada, Krishna Kumar Narayanan, Frank Hoffmann, Torsten Bertram
Semantic classification of scenes and places with omnidirectional vision
- 12:50-15:00 LUNCH BREAK
- 15:00-16:00 TRACKING CHAIR: Isil Bozma / COCHAIR: Erik Einhorn
- [15:00-15:20] Vo Duc My, Andreas Zell
Real time face tracking and pose estimation using an adaptive correlation filter for human-robot interaction
- [15:20-15:40] Michal Nowicki, Piotr Skrzypczynski
Combining photometric and depth data for lightweight and robust visual odometry
- [15:40-16:00] Manus McElhone, Jörg Stückler, Sven Behnke
Joint detection and pose tracking of multi-resolution surfel models in RGB-D
- 16:00-16:20 COFFEE BREAK
- 16:20-17:20 GRAPH SPARSIFICATION CHAIR: Guoquan Huang / COCHAIR: Luis Sentis
- [16:20-16:40]Christoph Rösmann, Wendelin Feiten, Thomas Wösch, Frank Hoffmann, Torsten Bertram
Efficient trajectory optimization using a sparse model
- [16:40-17:00] Yasir Latif, José Neira
Go straight, turn right: Pose graph reduction through trajectory segmentation using line segments
- [17:00-17:20] Guoquan Huang, Michael Kaess, John J. Leonard
Consistent sparsification for graph optimization
- 17:20-18:30 POSTER SESSION 1
THURSDAY, September 26
- 09:00-09:40 REGISTRATION
- 09:40-11:00 3D SEGMENTATION AND INTERPRETATION
CHAIR: Piotr Skrzypczynski / COCHAIR: Kai Wurm
- [09:40-10:00] Igor Bogoslavskyi, Olga Vysotska, Jacopo Serafin, Giorgio Grisetti, Cyrill Stachniss
Efficient traversability analysis for mobile robots using the Kinect sensor
- [10:00-10:20] Lingni Ma, Thomas Whelan, Egor Bondarev, Peter H. N. de With, John McDonald
Planar simplification and texturing of dense point cloud maps
- [10:20-10:40] Stefan Laible, Yasir Niaz Khan, Andreas Zell
Terrain classification with conditional random fields on fused 3D LIDAR and camera data
- [10:40-11:00] Ross Finman, Thomas Whelan, Michael Kaess, John J. Leonard
Toward lifelong object segmentation from change detection in dense RGB-D maps
- 11:00-11:20 COFFEE BREAK
- 11:20-12:40 OBJECT AND PLACE RECOGNITION CHAIR: Achim Lilienthal / COCHAIR: Jörg Stückler
- [11:20-11:40] Bogdan Harasymowicz-Boggio, Barbara Siemiątkowska
Object classification with metric and semantic inference
- [11:40-12:00] Dylan Campbell, Mark Whitty
Metric-based detection of robot kidnapping
- [12:00-12:20] Peer Neubert, Niko Sünderhauf, Peter Protzel
Appearance change prediction for long-term navigation across seasons
- [12:20-12:40] Torsten Fiolka, Jörg Stückler, Dominik A. Klein, Dirk Schulz, Sven Behnke
Distinctive 3D surface entropy features for place recognition
- 12:40-15:00 LUNCH BREAK
- 15:00-16:00 EXPLORATION CHAIR: Lino Marques / COCHAIR: Francesco Amigoni
- [15:00-15:20] Jan Faigl, Miroslav Kulich
On determination of goal candidates in frontier-based multi-robot exploration
- [15:20-15:40] Riccardo Cipolleschi, Michele Giusto, Alberto Quattrini Li, Francesco Amigoni
Semantically-informed coordinated multirobot exploration of relevant areas in search and rescue settings
- [15:40-16:00] Joan Vallvé, Juan Andrade-Cetto
Mobile robot exploration with potential information fields
- 16:00-16:20 COFFEE BREAK
- 16:20-17:20 INVITED TALK 2 CHAIR: Udo Frese / COCHAIR: Juan Andrade-Cetto
- Paul Newman, Do we need SLAM? Probably not
- 17:20-18:40 LOCALIZATION AND MAPPING CHAIR: Barbara Siemiątkowska / COCHAIR: Kai Wurm
- [17:20-17:40] Sven Hellbach, Marian Himstedt, Hans-Joachim Boehme
What's around me: Towards non-negative matrix factorization based localization
- [17:40-18:00] Ziyuan Liu, Wei Wang, Dong Chen, Georg von Wichert
A coherent semantic mapping system based on parametric environment abstraction and 3D object localization
- [18:00-18:20] Erik Einhorn, Horst-Michael Gross
Generic 2D/3D SLAM with NDT maps for lifelong application
- [18:20-18:40] Guoquan Huang, Robert Truax, Michael Kaess, John J. Leonard
Unscented iSAM: A consistent incremental solution to cooperative localization and target tracking
- 20:00 GALA DINNER
FRIDAY, September 27
- 09:00-09:40 REGISTRATION
- 09:40-11:00 APPLICATIONS CHAIR: Alberto Sanfeliu / COCHAIR: Christian Mandel
- [09:40-10:00] Ayan Dutta, Prithviraj Dasgupta, Jose Baca, Carl Nelson
A block partitioning algorithm for modular robot reconfiguration under uncertainty
- [10:00-10:20] Christoph Gruber, Michael Hofbaur
Control of a robot with a Swedish and a standard wheel
- [10:20-10:40] Antonio Jesús Palomino, Ángel García-Olaya, Fernando Fernández, Juan Pedro Bandera
From perception to action and vice versa: A new architecture showing how perception and action can modulate each other simultaneously
- [10:40-11:00] Kwan Suk Kim, Alan S. Kwok, Luis Sentis
Contact sensing and mobility in rough and cluttered environments
- 11:00-11:20 COFFEE BREAK
- 11:20-12:50 POSTER SPOTLIGHT 2 CHAIR: Primo Zingaretti / COCHAIR: Juan Andrade-Cetto
- [Poster #18] Michael Volkhardt, Horst-Michael Gross
Finding people in home environments with a mobile robot
- [Poster #19] Michael Volkhardt, Christoph Weinrich, Horst-Michael Gross
Multi-modal people tracking on a mobile companion robot
- [Poster #20] Marcel Haeselich, Michael Klostermann, Dietrich Paulus
Pedestrian detection in outdoor images using color and gradients
- [Poster #21] Jens Kessler, Matthias Schmidt, Sandra Helsper, Horst-Michael Gross
I'm still watching you: Update on observing a person in a home environment
- [Poster #22] Emal Sadran, Kai Wurm, Darius Burschka
Sparse keypoint models for 6D object pose estimation
- [Poster #23] Rasoul Mojtahedzadeh, Todor Stoyanov, Achim J. Lilienthal
Application based 3D sensor evaluation: A case study in 3D object pose estimation for automated unloading of containers
- [Poster #24] Wenhao Fu, Hicham Hadj-Abdelkader, Etienne Colle
Reactive collision avoidance using B-spline representation: Application for mobile robot navigation
- [Poster #25] Muhannad Mujahed, Dirk Fischer, Bärbel Mertsching
Safe gap based (SG) reactive navigation for mobile robots
- [Poster #26] Gonzalo Ferrer, Anaís Garrell, Alberto Sanfeliu
Social-aware robot navigation in urban environments
- [Poster #27] Marc Donner, Marian Himstedt, Sven Hellbach, Hans-Joachim Boehme
Awakening history: Preparing a museum tour guide robot for augmenting exhibits
- [Poster #28] Andry Tanoto, Javier V. Gómez, Nikolaos Mavridis, Hanyi Li, Ulrich Rückert, Santiago Garrido
Teletesting: Path planning experimentation and benchmarking in the Teleworkbench
- [Poster #29] Dong Chen, Ziyuan Liu, Georg von Wichert
Grasping on the move: A generic arm-base coordinated grasping pipeline for mobile manipulation
- [Poster #30] Andreas Masselli, Richard Hanten, Andreas Zell
Robust real-time detection of multiple balls on a mobile robot
- [Poster #31] Agustin Ortega, Ricardo Galego, Ricardo Ferreira, Alexandre Bernardino, Jose Gaspar, Juan Andrade-Cetto
Estimation of camera calibration uncertainty using LIDAR data
- [Poster #32] Andrei Vatavu, Sergiu Nedevschi
Vision-based tracking of multiple objects in dynamic unstructured environments using free-form obstacle delimiters
- [Poster #33] David Márquez-Gámez, Michel Devy
Active vision-based moving objects detection from a motion grid
- [Poster #34] Ali Marjovi, Lino Marques
Swarm robotic plume tracking for intermittent and time-variant odor dispersion
- 12:50-15:00 LUNCH BREAK
- 15:00-16:30 POSTER SESSION 2
- 16:30-16:50 CLOSING
- 20:00 CULTURAL VISIT + FAREWELL COCKTAIL