Arnau Ramisa, Guillem Alenyà, Francesc Moreno-Noguer and Carme Torras
Most current depth sensors provide 2.5D range images in which depth values are assigned to a rectangular 2D array. With the Fast Integral Normal 3D (FINDDD) descriptor we take advantage of this structured information to build an efficient shape descriptor which is about two orders of magnitude faster than competing approaches, while showing similar performance in several tasks involving deformable object recognition. Given a 2D patch surrounding a point and its associated depth values, we build the descriptor for that point, based on the cumulative distances between their normals and a discrete set of normal directions. This processing is made very efficient using integral images, even allowing to densely compute descriptors for every point in the image in a few seconds.
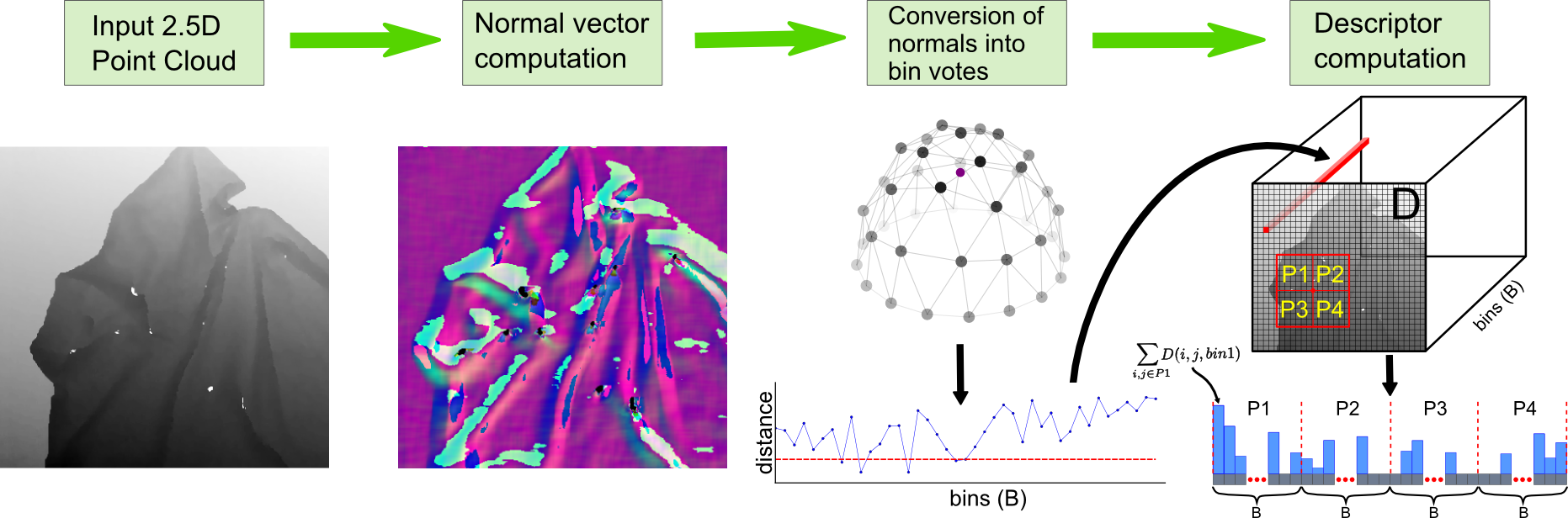
The steps to compute FINDDD descriptors can be summarized as follows:
- The normal vector of every point in the input structured point cloud is computed. This step can be done very fast using integral images.
- For each normal computed in the previous step, we construct a vector of size B with the votes based on the distance between the normal and the neighboring orientation bin centers.
- To compute a descriptor, all the previously computed vectors within a sub-region are added into an orientation histogram. Then, the orientation histograms of all sub-regions in the support area are concatenated to form the final descriptor vector.
- Finally, each descriptor is normalized using the L1 norm to make it robust to different densities in the number of points (i.e. NaN points, caused by occlusions or noisy information, are discarded). We found it beneficial to keep local density information by only normalizing at the global level.
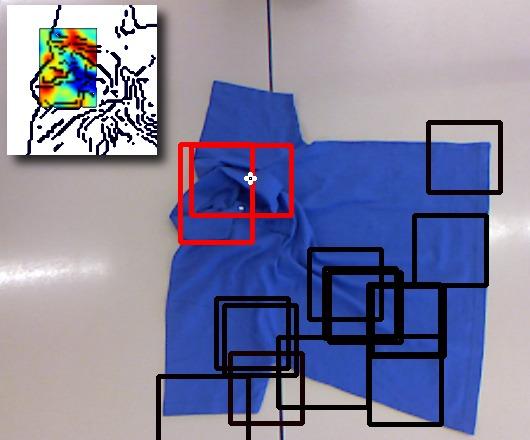
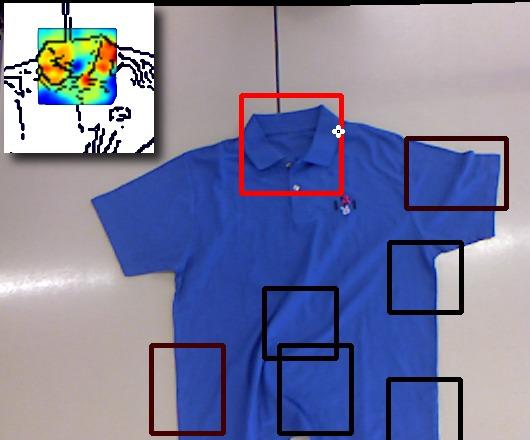
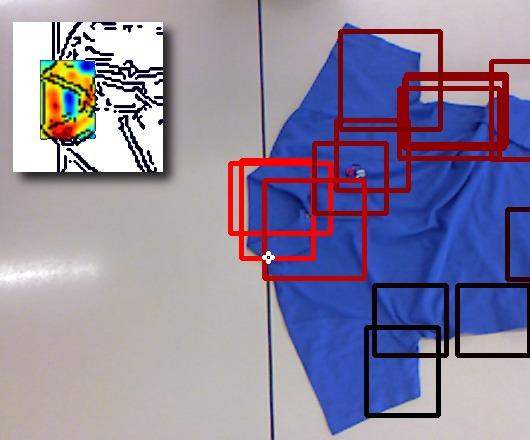
Example application: detection of lapel points. FINDDD Descriptors are extracted for all points within the collar area (red bounding box, detected using a previous method) and a logistic regression model is used to rank the points according to their probability of belonging to the lapel of the collar. The small figure inside each picture shows the lapel probability map, with edges superimposed for clarity.
 |
 |
 |
 |
Presentation
There is a short video explaining this work:
Reference
- FINDDD: A fast 3D descriptor to characterize textiles for robot manipulation , A. Ramisa, G. Alenya, F. Moreno-Noguer and C. Torras; In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 824-830, 2013
- Determining Where to Grasp Cloth Using Depth Information, A. Ramisa, G. Alenya, F. Moreno-Noguer and C. Torras; In Frontiers in Artificial Intelligence and Applications: Artificial Intelligence Research and Development , vol. 232, pp. 199-207, 2011
Downloads