D. Martínez-Martínez, G. Alenya, and C. Torras
This work presents a new approach to plan manipulation actions for cleaning surfaces in household environments, e.g., cleaning the dust from a table using a textile. Drag actions can change the disposal of the dust in an unpredicted manner, and thus, the planning becomes challenging. We propose to define the problem using explicitly the uncertainty of the perceptions and actions, and use a planner to select the most effective sequence of actions in terms of time. We demonstrate experimentally, with two different robot platforms, that planning, in contrast to reactive strategies, is advantageous in such complex tasks. However, executing a long sequence of actions is not beneficial as the state becomes hard to predict after some actions. In such long tasks, replanning with newer perceptions after performing a few actions gives the best results.
Introduction
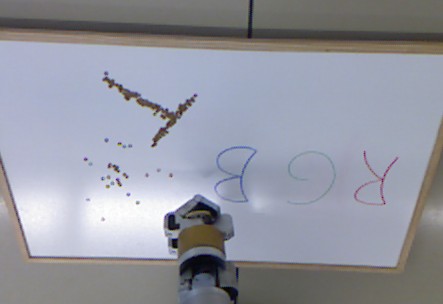
The method to clean surfaces was developed for two different platforms: REEM service robot, and a WAM manipulator cell. The cleaning skills included cleaning small objects like lentils and painted surfaces. Below you can see the robots cleaning.
| WAM cleaning lentils | REEM cleaning a whiteboard |
|---|---|
Method
Perception
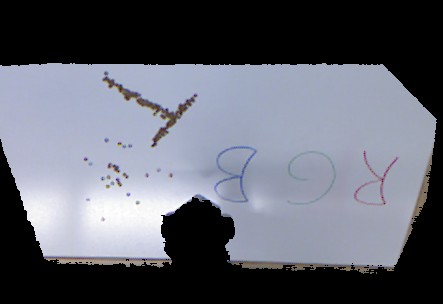
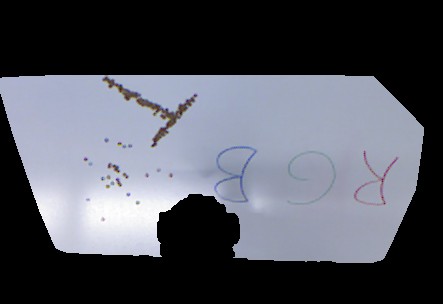
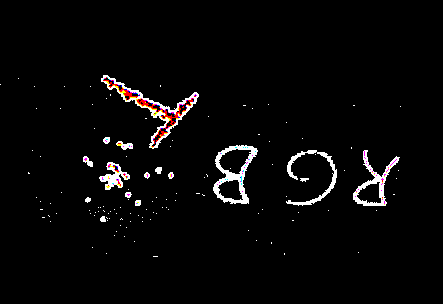
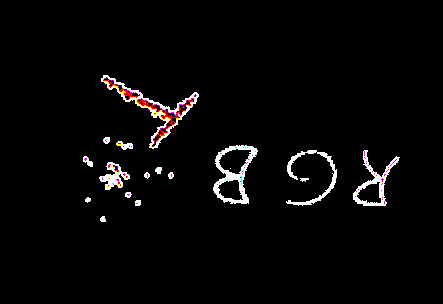
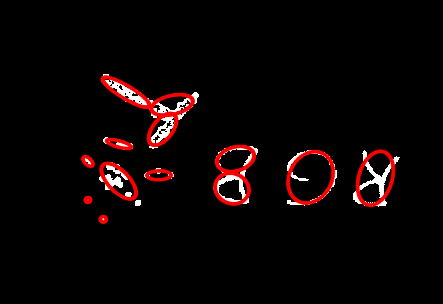
The method takes perceptions using RGBD cameras which provide both depth and color information to segment dirty surfaces. A representation based on the ellipses is made from those dirty areas which is used later by the planner and the actions.
| Camera image | Plane segmentation | Remove edges |
|---|---|---|
  Click images to enlarge Click images to enlarge |
 Click images to enlarge Click images to enlarge |
 Click images to enlarge Click images to enlarge |
| Remove background | Remove noise | Ellipse representation |
 Click images to enlarge Click images to enlarge |
 Click images to enlarge Click images to enlarge |
 Click images to enlarge Click images to enlarge |
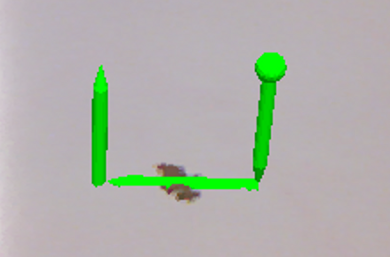
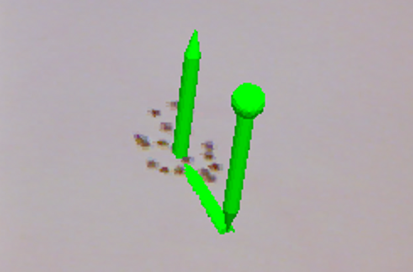
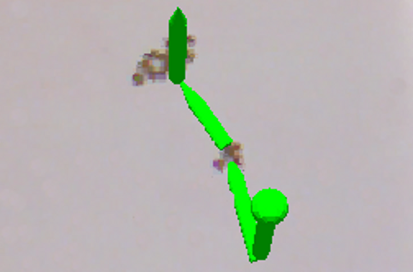
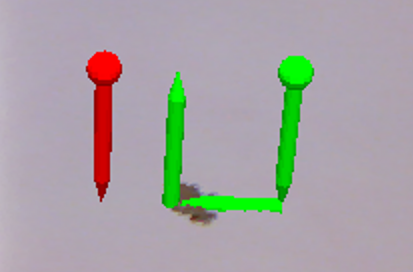
Actions for cleaning lentils
4 actions were defined to clean lentils, which can be divided in two groups: cleaning actions that remove dirt from the surface, and grouping actions that rearrange the objects so they become easier to clean for future actions.
| Group lentils 3D | Join groups 3D | Pick up lentils 3D | Move to container 3D |
|---|---|---|---|
 |
 |
 |
 |
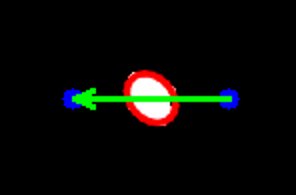
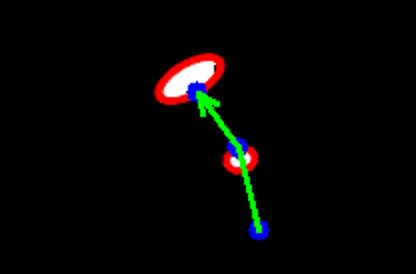
| Group lentils 2D | Join groups 2D | Pick up lentils 2D | Move to container 2D |
 |
 |
 |
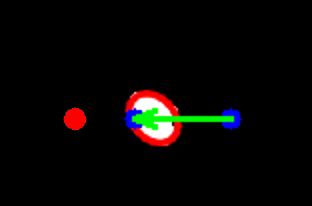 |
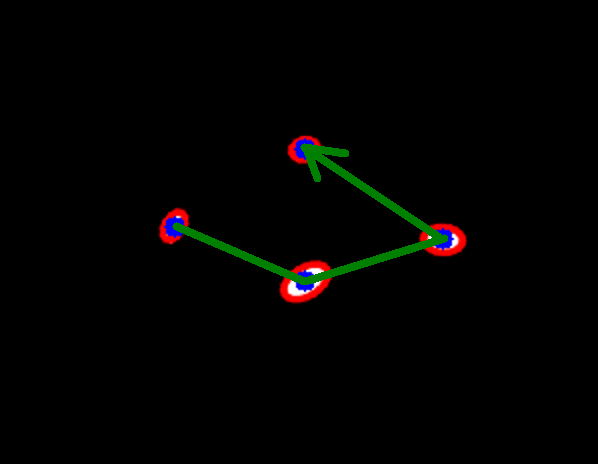
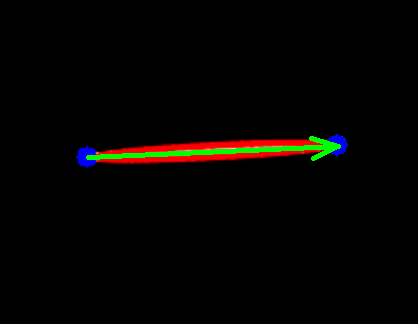
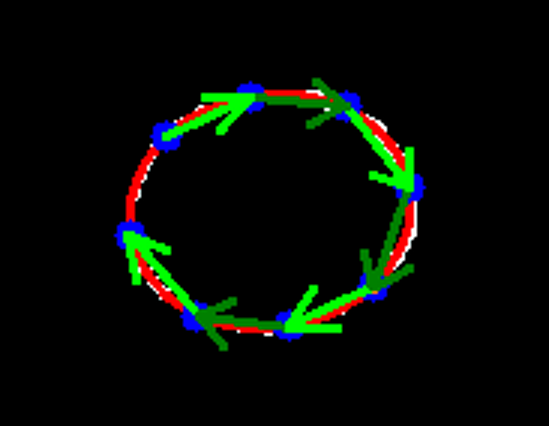
Actions for erasing a painted board
We used three different actions to complete this task. The actions get different results depending on the type of dirty area that they are cleaning, and they can be combined to clean big dirty areas.
| Small clean | Straight clean | Circular clean |
|---|---|---|
 |
 |
 |
Planning
The planner selects the set of actions to execute based on the perceptions and the probabilistic effects of action sequences. The task is quite complex, and selecting the fastest action sequence is challenging. Plans beginning with grouping actions may penalize in the beginning (remove no dust) compared to cleaning actions, but they can provide the best results in the long run. Also, actions can change the dust layout and thus, last actions in a long sequence may be inappropriate. The PRADA planner (Lang and Toussaint, Planning with Noisy Probabilistic Relational Rules , JAIR 2010) allows to describe the problem in terms of uncertain action outcomes.
Download
- The code is available at the IRI repository. The svn revision used for the experiments was 7228.
- It requires IRI_ROS which can be obtained following the instructions at wikiri.
Literature
This work is presented in:
- Planning robot manipulation to clean planar surfaces, D. Martínez-Martínez, G. Alenya, and C. Torras. Submitted.