Determining Where to Grasp Cloth Using Depth Information
A. Ramisa, G. Alenya, F. Moreno-Noguer and C. Torras
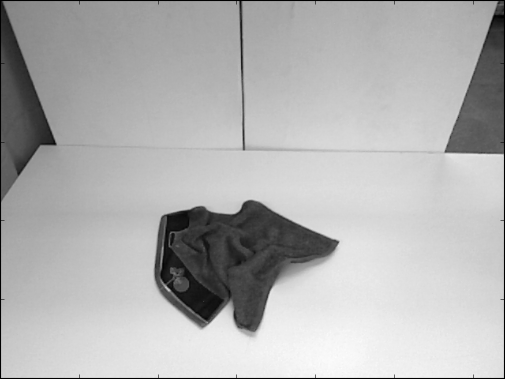
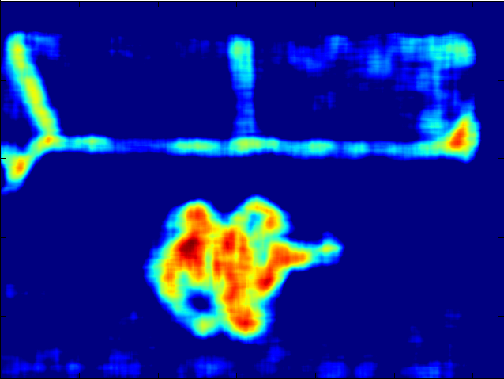
Here we address the problem of finding an initial good grasping point for the robotic manipulation of textile objects lying on a solid flat surface. Given as input a point cloud of the textile object acquired with a 3D camera, we propose choosing as grasping points those that maximize a new measure of wrinkledness. The wrinkledness is measured as the entropy in the normal angle distribution in a local area.