Institut de Robòtica
i Informàtica Industrial
Pragmatic Experiments with Mobile Robots with Search-and-Track Methods using State-of-the-Art Techniques
Alex Goldhoorn, Anaís Garrell, Fernando Herrero, René Alquézar and Alberto Sanfeliu
Autonomous Robots
Maps
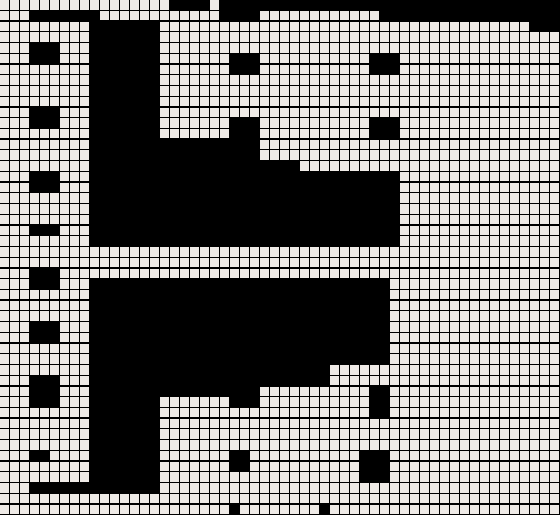
The discritized maps used in the simulations and real experiments can be downloaded here, the description below.| UPC - Telecos Square | ||
 |
||
| Size | 48 x 56 cells | |
| Real size | 38 m x 45 m | |
| Cell size | 0.8 m x 0.8 m | |
| Accessible area | 1153 m2 | |
| File | telecos_loop.txt | |
File specifications
The text file contains the map as a matrix, and its values are comma separated- number of columns;
- number of rows;
- matrix of rows x columns with three possible values:
- 0: a free cell;
- 1: an obstacle (not accessible by the robot, nor can the robot see through it);
- 2: the base (a free cell, but used as base in the hide-and-seek game).
An example is:
3,2,
100
120
This examples has 3 rows and 2 colums, an obstacle at (0,0), and (0,1), and the base at (1,1).
Follow us!