
I recently finished my PhD in Robotics at the Institut de Robòtica i Informàtica Industrial. My advisors were Lluís Ros and Montserrat Manubens.
My research seeks to contribute to the general understanding on how the motions of complex multibody systems can be predicted, planned, or controlled in an efficient and reliable way. In particular, I am now interested in robot dynamics and control, which I would like to combine with my growing interest for robot vision and sensing. I am currently working in the developoment, motion planning, and control of parallel robots, and of a cable-driven hexapod taking into account collision and singularity avoidance, force feasibility, and surface-following constraints.
Before my PhD, I worked as an orbital mechanics engineer at the French Space Agency (Toulouse, France), where I developed methods and tools for space mechanics and space flight dynamics for mission analysis and design. This work resulted in the release of the CelestLab toolbox for Scilab.
A version of my resume can be seen here.
PhD THESIS
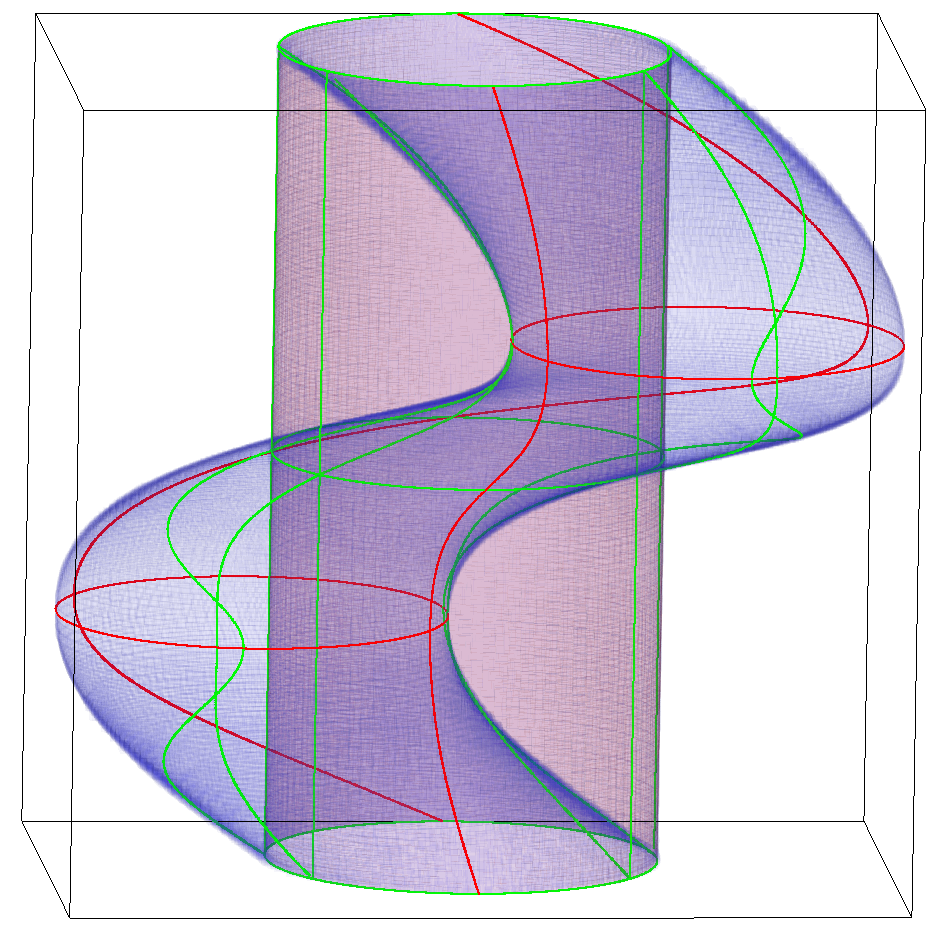
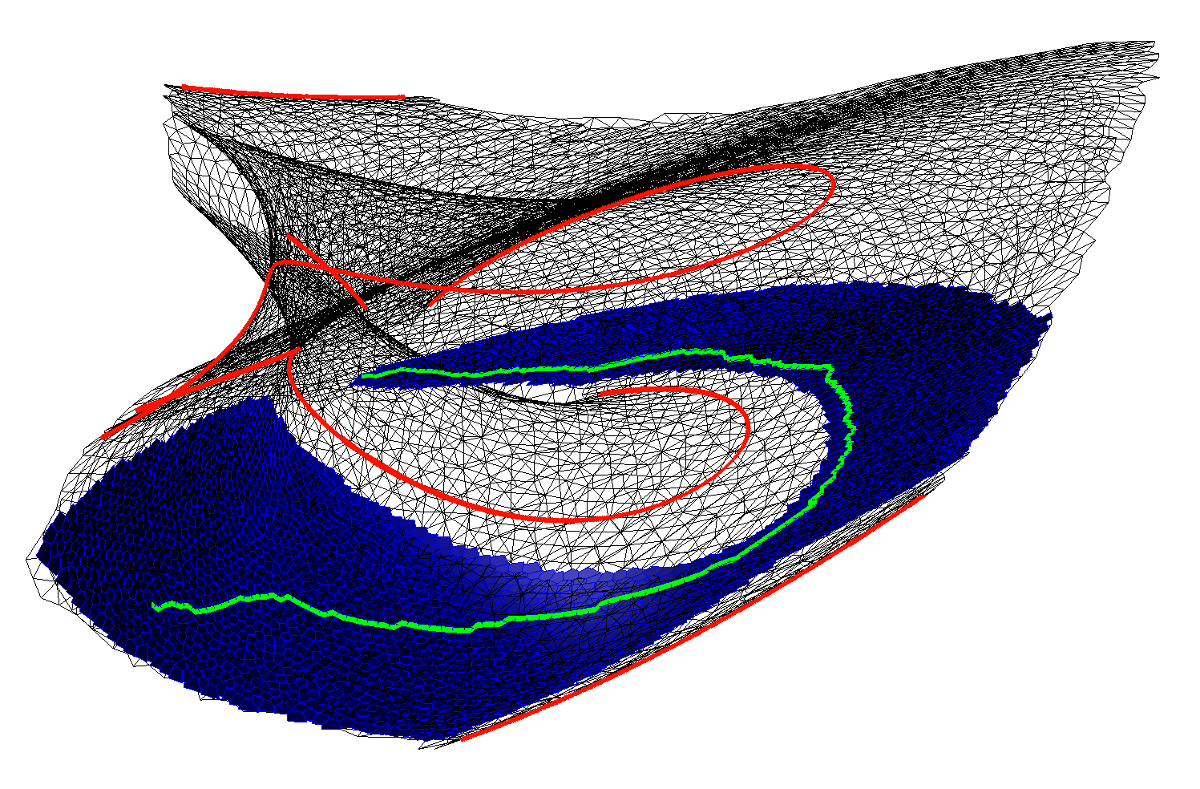
The purpose of my thesis was to take advantage of recent advances in the field of numerical methods in order to propose general and robust methods for the computation and avoidance of singularities of robotic manipulators:
Numerical Computation and Avoidance of Manipulator Singularities.
INTERNATIONAL JOURNALS

|
The CUIK Suite: Motion Analysis of Closed-chain Multibody Systems |

|
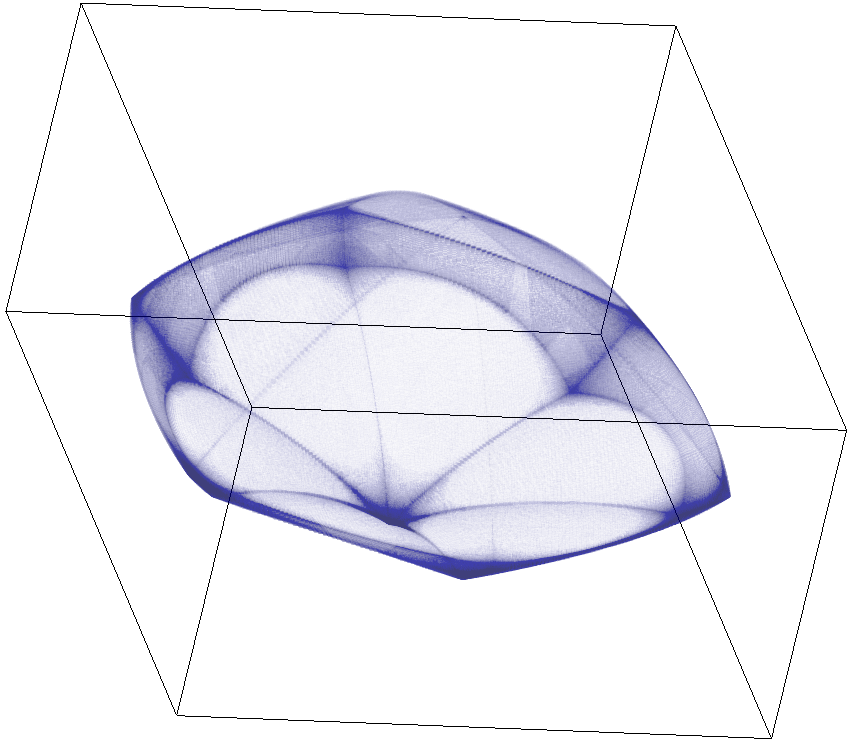
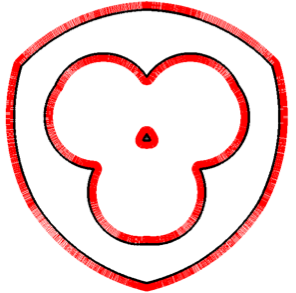
A General Method for the Numerical Computation of Manipulator Singularity Sets |
|
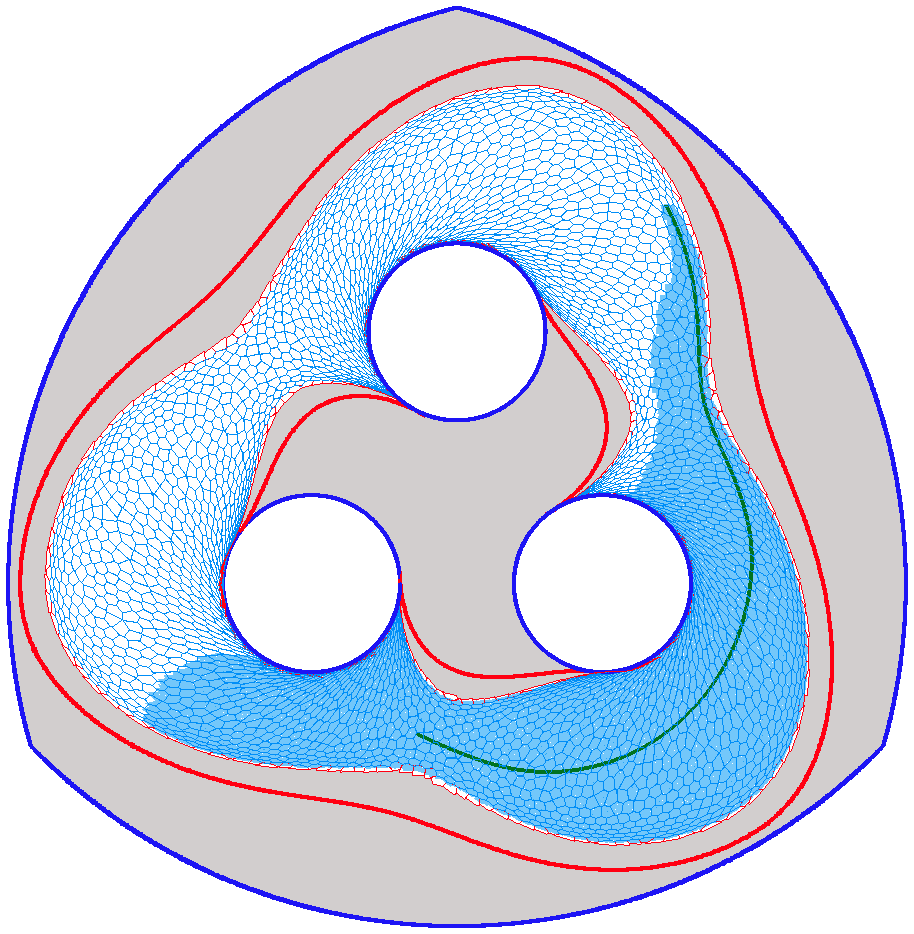
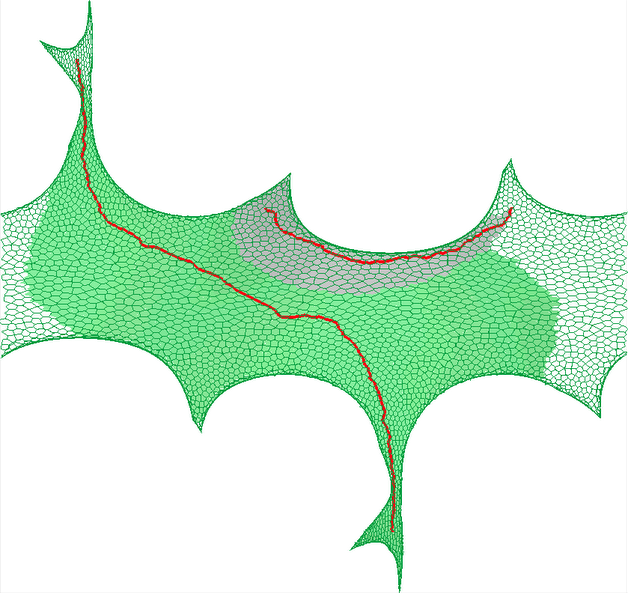
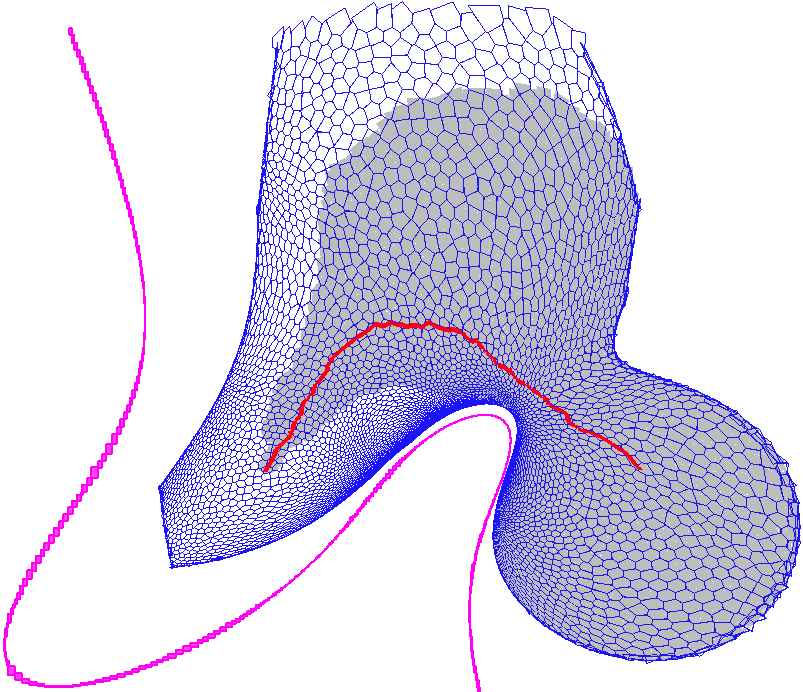
Planning Singularity-free Paths on Closed-Chain Manipulators |

|
Singularities of Non-redundant manipulators: A Short Account and a Method for their Computation in the Planar Case |
|
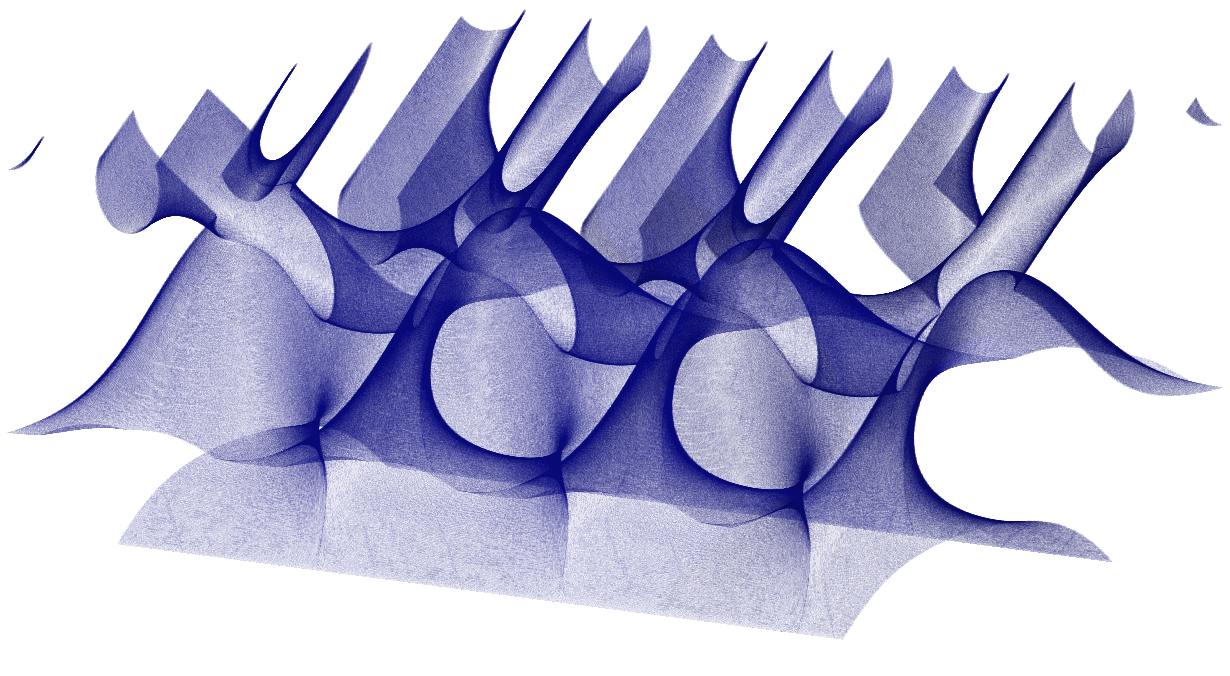
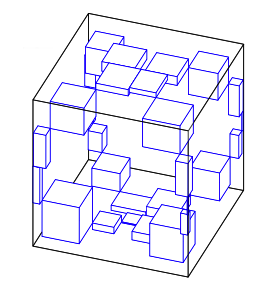
A Linear Relaxation Method for Computing Workspace Slices of the Stewart Platform |
|
Randomized Path Planning on Manifolds based on Higher-Dimensional Continuation |
|
A Complete Method for Workspace Boundary Determination on General Structure Manipulators |
BOOK CHAPTERS
|
Navigating the Wrench-feasible C-space of Cable-driven Hexapods |
|
Planning Singularity-free Force-feasible Paths on the Stewart Platform |
|
A Complete Method for Workspace Boundary Determination |
INTERNATIONAL CONFERENCES
|
An open-source toolbox for motion analysis of closed-chain mechanisms |
|
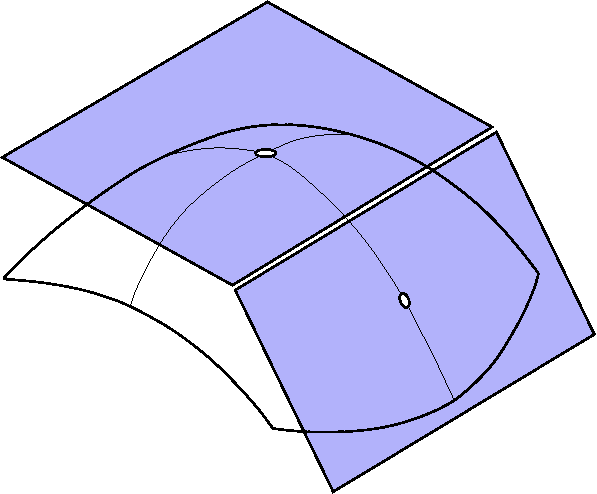
On the Numerical Classification of the Singularities of Robot Manipulators |

|
Numerical Computation of Manipulator Singularities |
|
A Singularity-free Path Planner for Closed-chain Manipulators |
|
A Unified Method for Computing Position and Orientation Workspaces of General Stewart Platforms |
TECHNICAL REPORTS
|
Branch switching from singular points in higher-dimensional continuation |