PhD thesis
Information Metrics for Localization and Mapping
J. Vallvé Supervisors: J. Andrade-Cetto and Joan Solà info | pdf
journals
WOLF: A Modular Estimation Framework for Robotics Based on Factor Graphs
. Solà*, J. Vallvé*, J. Casals, J. Deray, M. Fourmy, D. Atchuthan, A. Corominas-Murtra, and J. Andrade-Cetto IEEE Robotics and Automation Letters, vol. 7(2), pp. 4710–4717, 2022. info | pdf | www
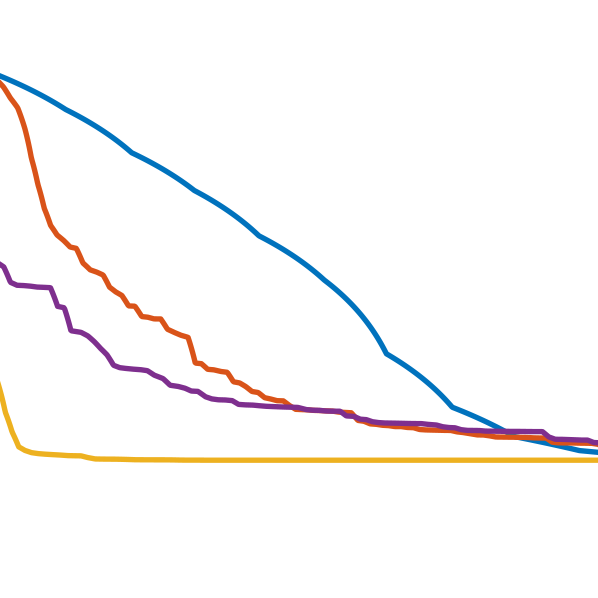
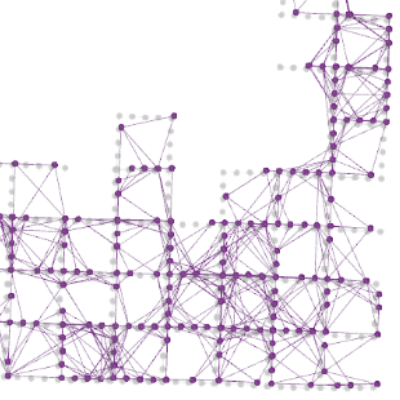
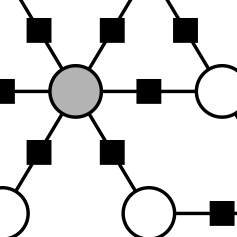
Pose-graph SLAM sparsification using factor descent
J. Vallvé, J. Andrade-Cetto and Joan Solà Robotics and Autonomous Systems, vol. 119, pp. 108-118, 2019. info | pdf | www
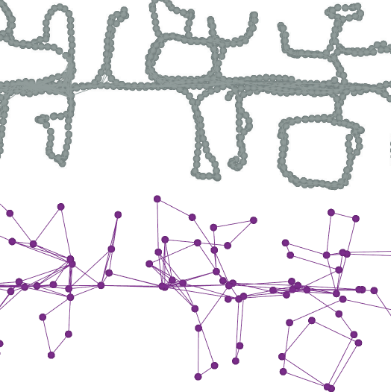
Graph SLAM sparsification with populated topologies using factor descent optimization
J. Vallvé, Joan Solà and J. Andrade-Cetto IEEE Robotics and Automation Letters, vol. 3, pp. 1322-1329, 2018. info | pdf | www
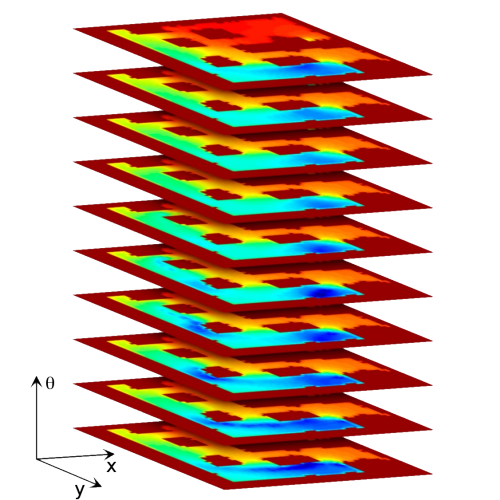
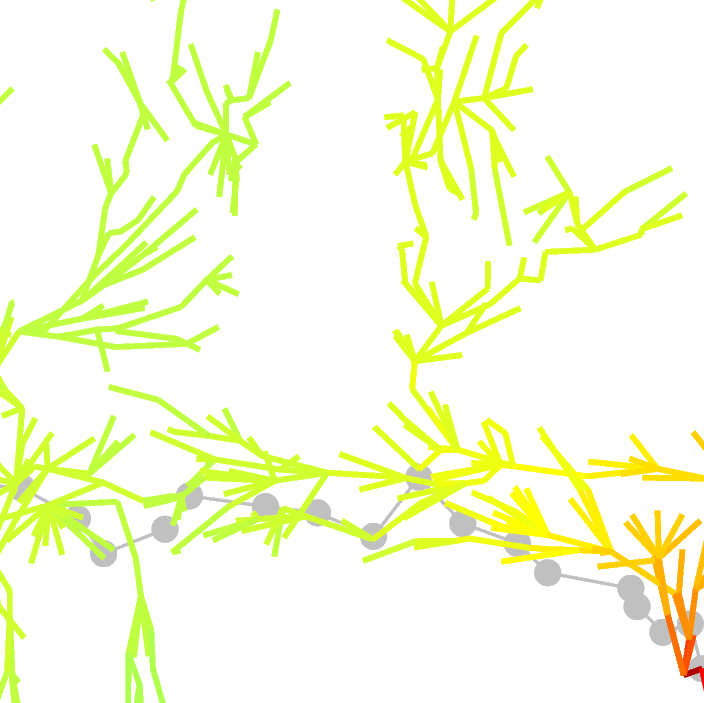
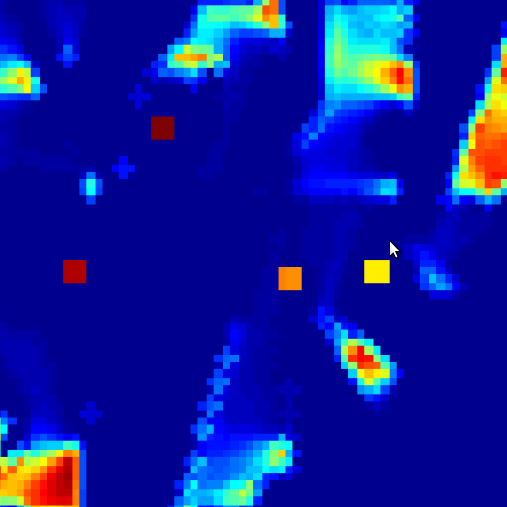
Potential information fields for mobile robot exploration
J. Vallvé and J. Andrade-Cetto Robotics and Autonomous Systems, vol. 69, pp. 68-79, 2015. info | pdf | www
conferences

Fast bi-monocular visual odometry using factor graph sparsification
C. Debeunne, J. Vallvé, A. Torres and D. Vivet 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, Detroit, MI, USA, pp. 10716-10722. info | pdf | www
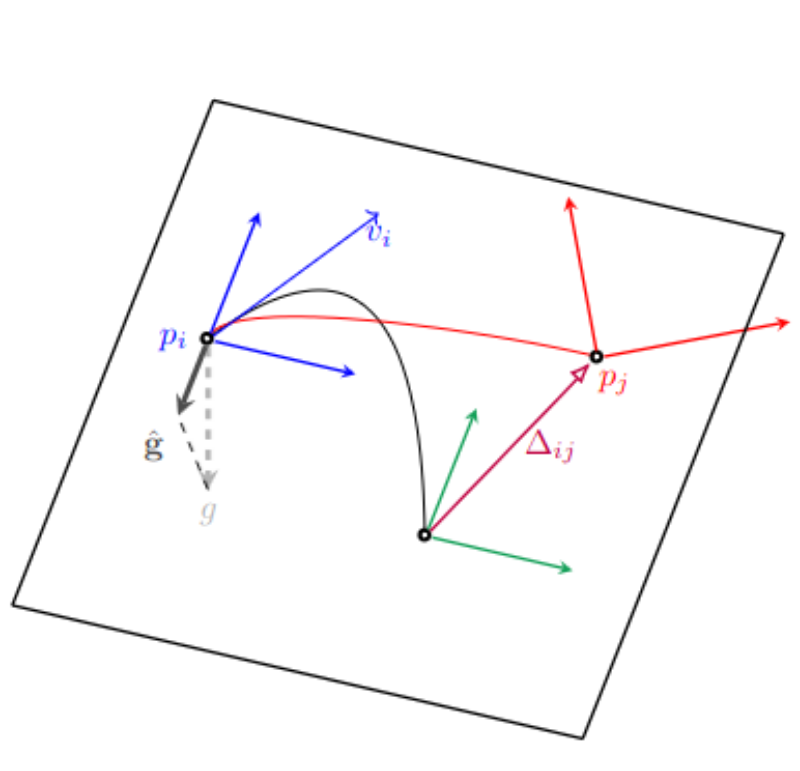
IMU preintegration for 2D SLAM problems using Lie Groups
I. Geer, J. Vallvé, and J. Solà 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022, Kyoto, Japan, 2022, pp. 1367-1373. info | pdf | www
Factor Descent optimization for sparsification in graph SLAM
J. Vallvé, J. Solà and J. Andrade-Cetto 2017 IEEE European Conference on Mobile Robotics, 2017, Paris, pp. 95-100. info | pdf | www
Observability analysis and optimal sensor placement in stereo radar odometry
A. Corominas Murtra, J. Vallvé, J. Solà, I. Flores and J. Andrade-Cetto 2016 IEEE International Conference on Robotics and Automation, 2016, Stockholm, pp. 3161-3166. info | pdf | media | www
Active Pose SLAM with RRT*
J. Vallvé and J. Andrade-Cetto 2015 IEEE International Conference on Robotics and Automation, 2015, Seattle, pp. 2167-2173. info | pdf | media | www
Dense entropy decrease estimation for mobile robot exploration
J. Vallvé and J. Andrade-Cetto 2014 IEEE International Conference on Robotics and Automation, 2014, Hong Kong, pp. 6083-6089. info | pdf | media | www

Localization in highly dynamic environments using dual-timescale NDT-MCL
R. Valencia, J. Saarinen, H. Andreasson, J. Vallvé, J. Andrade-Cetto and A. Llilienthal 2014 IEEE International Conference on Robotics and Automation, 2014, Hong Kong, pp. 3956-3962. info | pdf | www
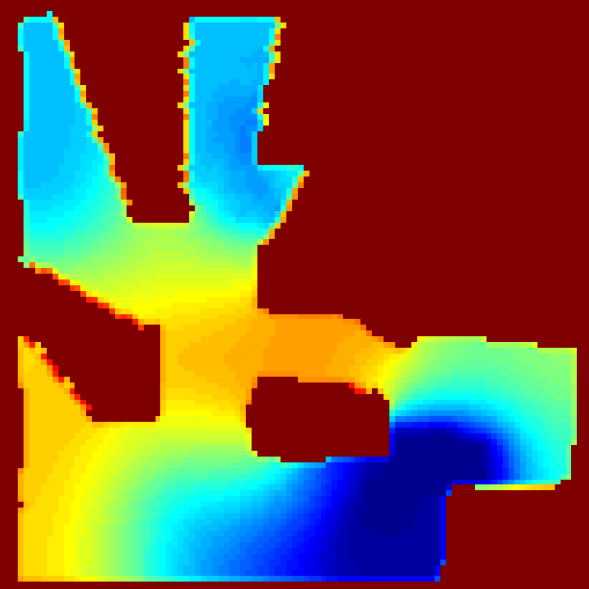
Mobile robot exploration with potential information fields
J. Vallvé and J. Andrade-Cetto 6th European Conference on Mobile Robots, 2013, Barcelona, pp. 222-227. info | pdf | www