Learned Vertex Descent: A New Direction for 3D Human Model Fitting
Learned Vertex Descent: A New Direction for 3D Human Model Fitting
E.Corona, G.Pons-Moll, G.Alenyà and F.Moreno-Noguer
European Conference on Computer Vision (ECCV), 2022
@article{Corona_eccv2022,
title = {Learned Vertex Descent: A New Direction for 3D Human Model Fitting,
author = {Enric Corona and Gerard Pons-Moll and Guillem Alenyà and Francesc Moreno-Noguer},
booktitle = {Proceedings of the European Conference on Computer Vision (ECCV)},
year = {2022}
}
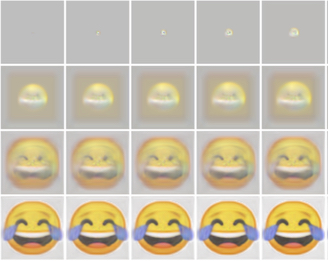
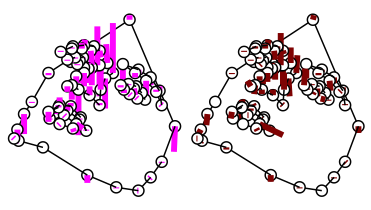
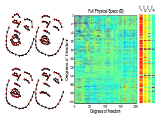
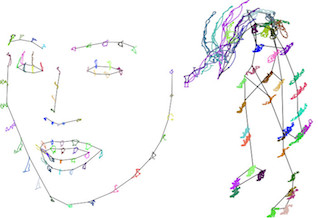
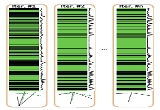
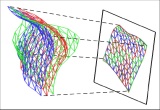
We propose a novel optimization-based paradigm for 3D human model fitting on images and scans. In contrast to existing approaches that directly regress the parameters of a low-dimensional statistical body model (e.g. SMPL) from input images, we train an ensemble of per vertex neural fields network. The network predicts, in a distributed manner, the vertex descent direction towards the ground truth, based on neural features extracted at the current vertex projection. At inference, we employ this network, dubbed LVD, within a gradient-descent optimization pipeline until its convergence, which typically occurs in a fraction of a second even when initializing all vertices into a single point. An exhaustive evaluation demonstrates that our approach is able to capture the underlying body of clothed people with very different body shapes, achieving a significant improvement compared to state-of-the-art. LVD is also applicable to 3D model fitting of humans and hands, for which we show a significant improvement to the SOTA with a much simpler and faster method. Code is released at https://www.iri.upc.edu/people/ecorona/lvd/