On this page you can see the segmentation/tracking results using our algorithm. You can also download the associated datasets.
The page is organized as follows:
- Brief Explanation
- Scenario: Segmentation of a single Frame
- Video and Dataset for Figure 4 in the paper
- Video and Dataset for Figure 5 in the paper
- Video and Dataset for ABW data, Table 1 in the paper
- Results and Dataset for Figure 13 in the paper
- Results and Dataset for Perceptron data, Table 1 in the paper
- Results and Dataset for Figure 14 in the paper
- Results and Dataset Cornell-RGBD-Dataset
- Results and Dataset Kinect-segmentation-Dataset
- Scenario: Video segmentation with static camera
- Video and Dataset for Figure 6 in the paper
- Video and Dataset for Figure 7 in the paper
- Video and Dataset for Figure 8 in the paper
- Video and Dataset for Figure 9 in the paper
- Video and Dataset for Figure 10 in the paper (the pitcher from RGB-D Object dataset)
- Scenario: Video segmentation with moving camera
- Additional Results
- File Format
Brief Explanation
In the following videos you can see the segmentation results using only depth data. Each segment carries a unique label which is displayed on the centroid of the segment. The labels will be best visible if the video is set to higher resolution.
Scenario 1 : The algorithm was run on a single frame repeatedly to achieve initial segmentation.
Figure 4: Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download
Figure 5: Video (Sensor -> LMS-Z210 by Reigl) | Dataset External link to webpage and dataset | Segmentation Result download
Table 1, ABW Dataset Video (Sensor -> ABW structured light camera) | Dataset: External link to webpage and dataset | Segmentation Result download
Figure 13: (Sensor -> ABW structured light camera) | Dataset External link to webpage and dataset | Segmentation Result download
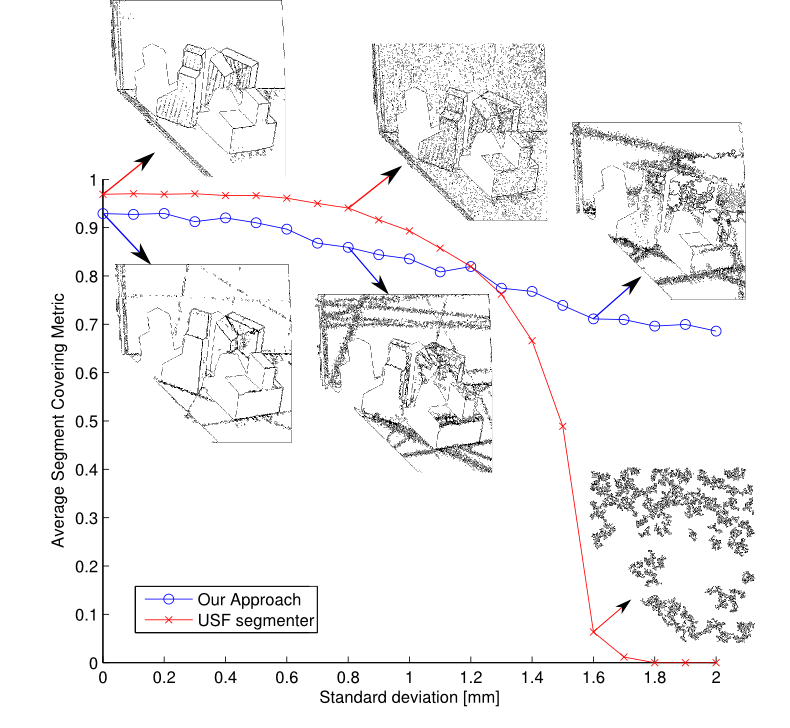
Table 1, Perceptron Dataset: (Sensor -> Perceptron LADAR camera) | Dataset External link to webpage and dataset | Segmentation Result download
Figure 14: (Sensor -> Kinect camera) | Dataset External link to webpage and dataset | Segmentation Result : processed depths , raw depths
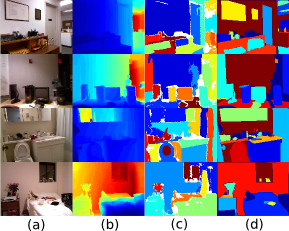
Cornell-RGBD-Dataset
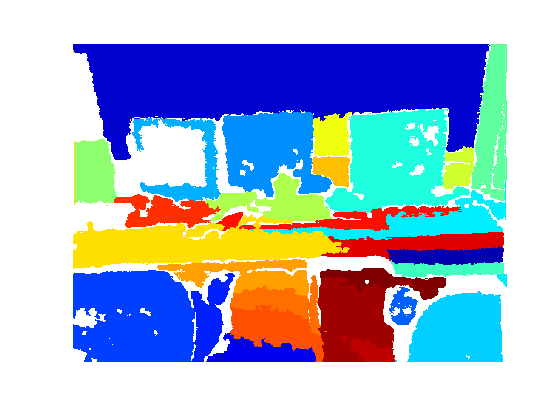
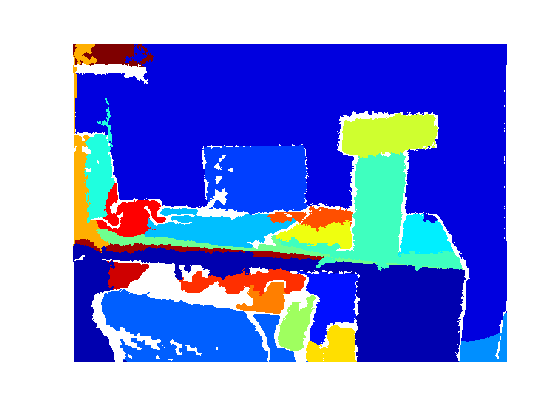
From here you can also donwload our segmentation results.
Kinect-segmentation-Dataset

External link to their webpage, where you can download their dataset.
From here you can also donwload our segmentation results.
Scenario 2 : The camera pose was kept static while recording data.
Figure 6: Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download | Ground Truth download
Figure 7: Video (Sensor -> Kinect camera) | Dataset : download | Segmentation Result download | Ground Truth download
Moving object using robot arm + gripper
Figure 8: Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download | Ground Truth download
Figure 9: Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download
Figure 10: Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download
Scenario 3 : The camera was moving while the environment was static.
Figure 11: Video (Sensor -> Odetics LADAR camera | Dataset External link to webpage and dataset | Segmentation Result download
Figure 12: Video (Sensor -> TOF camera) | Dataset External link to webpage and dataset | Segmentation Result download | Ground Truth download
Additional Results
Video (Sensor -> Kinect camera) | Dataset download | Segmentation Result download
| Weighted Score | Unweighted Score | |
| NYU_dataset_v2 |
53.55 |
26.01 |
File Format:
The *mat files contain datasets which are provided by us. It will load the XYZ and RGB data for each frame in the form of a grid resulting in an array of size (l × w × 3 × n). Where l and w are the frame length and width respectively and n is the number of frames.
Copyright
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without explicit permission of the copyright holder.