
|
|
|
|
RobotHand.world File ReferenceA generic anthropomorphic hand with 4 fingers. More... Go to the source code of this file. Detailed DescriptionThis is an instance of a 4 fingered robot hand with a particular geometry that corresponds to the MA-I developed at IOC. 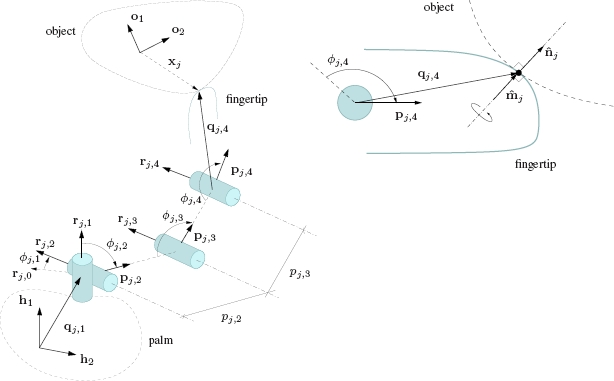
The geometry for this hand is given by the following anchor points of the fingers on the hand (
and by the length of the phalanges (
The ranges for the universal joint attaching finger The object,contact points and contact normals (either on the figertip or in the object) indicated in the source file can be modified to solve the kinematics of different grasping problems. Definition in file RobotHand.world. | ||||||||||||||||||||||||||||||||||||||||||||||||||
 )
) )
) 


 )
) )
)  and
and  and the limits for the two revolute joints in-between the phalanx
and the limits for the two revolute joints in-between the phalanx  are given by the minimum and maximum values for
are given by the minimum and maximum values for  .
.{kind=link}