Research line
Computational Robotics
The COMPUTATIONAL ROBOTICS Group investigates the theoretical, computational, and implementation aspects that arise in the design, construction, motion planning, and control of complex robotic systems. Among these we find serial, parallel, or locomotive robots, intelligent prostheses, biomechanical support systems for movement or rehabilitation, or other robots that, due to their sensory and compliance capacities, can safely interact with humans in an agile manner.
Head of line: Alba Perez Gracia

Research areas
>> Robot design and construction
>> Computational kinematics and dynamics
>> Singularity analysis
>> Motion planning and control

Tech. transfer
Our activity finds applications in several fields through collaboration with our technological partners
Facilities

Research projects
We carry out projects from national and international research programmes.
→ More about our research projects
<< Back to Computational Robotics main page
Robot design and construction
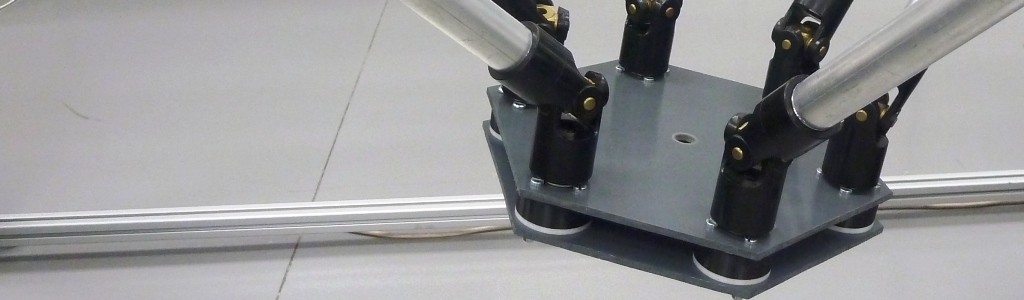
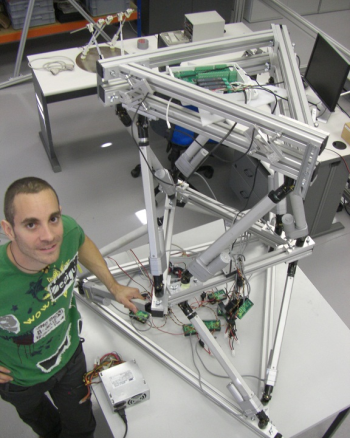
The group designs and constructs innovative mechatronic devices based mainly on parallel architectures. Our developments include the “Wrenchpad” (a six-axis tactile pad), several tensegrity-based robots, a pentaglide, several variations of the Gough-Stewart platform, different cable-driven robots, and the "Scherbot" robot (a five-bar mechanism to test kinodynamic motion planning and control techniques to cross singularities). The group also works on the development of various reconfigurable robots. These offer the possibility of reducing the number of actuators needed to perform a task, with the consequent decrease in construction costs. Moreover, reconfigurations can also be used to enlarge the robot’s workspace, or to avoid problematic configurations like singularities.
Computational kinematics and dynamics
In this area, the group develops novel methods for the position analysis of multibody systems. The problem consists of finding all possible configurations that a multibody system can adopt while respecting the kinematic constraints imposed by its joints. The techniques can be applied to robotics (in contexts like direct or inverse kinematics, cooperative manipulation, grasping, or motion planning), structural biology (e.g., to conformational analysis of biomolecules), or multibody dynamics (initial position and finite displacement problems). The group works using two approaches: one based on relaxation techniques, and the other based on characteristic polynomials using Distance Geometry. Many of the developments are implemented in the CUIK suite, a large toolbox for motion analysis and synthesis of closed-chain multibody systems. The group also has expertise on advanced dynamics algorithms based on Clifford or Spatial Vector algebras, as well as on advanced methods of simulation of constrained dynamical systems through integration on manifolds.

Singularity analysis
Singularities play a prominent role for understanding the configuration space of a robot. Depending on their nature, they give rise to overspeeding problems, dexterity losses, or controllability issues. Thus, these configurations are often avoided during the usual operation of a robot, especially in applications that require careful human-robot interactions. Singularities, however, may also give rise to mechanical advantage (e.g., they can be used to transform small motor torques into large end-effector forces) and also provide the boundary of the workspace, which is a crucial information for the robot designer. The group has developed new geometric and computational tools that allow characterizing the singularity loci of a robot, either for specific classes of robots, or for general multibody systems. New algorithms for controlling the motions across forward singularities have been developed as well, which allow the extension of the reachable workspace in parallel mechanisms.
Motion planning and control
Along this line, the group develops algorithms for the planning and control of motions of general multibody systems. These systems may involve holonomic or nonholonomic constraints, like loop-closure, contact, or rolling constraints. The goal is to design feasible trajectories bringing the robot to a desired state without colliding with obstacles, and to obtain robust controllers to track the trajectories in practice. Several techniques have been developed to both ends, which consider the kinematic constraints of the robot, or also its full dynamic model (including motor saturations and speed limits). In both cases, innovative methods based on higher-dimensional continuation and randomized sampling techniques have been proposed for the planning of motions. These motions are further refined using trajectory optimization methods. The control of motions, in turn, is achieved by means of numerical optimal control techniques. The group has expertise on applying these techniques to fixed-base manipulators, mobile platforms of various sorts (omnidirectional, nonholonomic, or inverted-pendulum ones), cable driven robots, or flying drones. The group has also investigated the connections with related problems in biochemistry, contributing with novel algorithms for finding low-energy paths between molecular conformations.

These are the latest research projects of the Computational Robotics research line:

-

KINODYN: Kinodynamic planning of efficient and agile robot motions
National Project
Start Date: 01/01/2018

-

RobCab: Control strategies for cable-driven robot for low-gravity simulation
National Project
Start Date: 01/01/2015
-

CUIK++: An Extension of Branch-and-Prune Techniques for Motion Analysis and Synthesis of Complex Robotic Systems
National Project
Start Date: 01/01/2011

-

CUIK+: Analysis and motion planning of complex robotic systems
National Project
Start Date: 01/10/2007
-

CUIK: Planificador de trayectorias para sistemas robotizados de arquitectura arbitraria
National Project
Start Date: 13/12/2005
-

TenSeBot: Estudio de estructuras tensegrity para el desarrollo de sensores manipuladores y robots móviles
National Project
Start Date: 01/10/2006
-

SIRVENT: Sistema reconfigurable para la navegación basada en visión de robots caminantes y rodantes en entornos naturales.
National Project
Start Date: 01/12/2003
-

DIST: Design and implementation of efficient parallelizable algorithms with applications to robotics and proteomics
National Project
Start Date: 01/12/2003
-

ARGOS: Navegación autónoma de robots guiados por objetivos visuales
National Project
Start Date: 28/12/2000
-

RESOL: Resolución de sistemas de ecuaciones cinemáticas para la simulación de mecanismos, posicionado interactivo de objetos y conformación de moléculas
National Project
Start Date: 28/12/2000
-

NAVEGA: Navegación basada en visión de robots autónomos en entornos no estructurados.
National Project
Start Date: 01/08/1997
-

CUIK-IT: Un sistema modular para el análisis cinemático y la construcción de manipuladores planares
CSIC Project
Start Date: 01/01/2012

-

WRENCHPAD: Plataforma torsométrica basada en estructuras de tensigridad
CSIC Project
Start Date: 01/07/2006
-

AMOBIO: Reconstrucció i anàlisi del moviment de grans estructures robòtiques i bioquímiques.
Regional Project
Start Date: 01/01/2007


-

PIPPO+: Learning the kinematics of a parallel robot
Technology Transfer Contract
Start Date: 08/03/2023
-

AquaShake: Mejora del sistema de vibración del ZebraCam
Technology Transfer Contract
Start Date: 23/05/2022
-

AquaLight: Mejora de la iluminación del ZebraCam
Technology Transfer Contract
Start Date: 12/01/2022

-

COL-VI: Automatic diagnosis of collagen VI-related muscular dystrophies
Technology Transfer Contract
Start Date: 01/09/2020
-

SICOSOL: Sistemas de Seguimiento y Concentración de Energía Solar
Technology Transfer Contract
Start Date: 20/06/2014
-

IDAHO: Kinematic synthesis for scalable finger/thumb exoskeleton robot
Technology Transfer Contract
Start Date: 12/03/2010
-

MANIPTENS: Estudio y diseño de manipulador mecánico sobreactuado basado en estructuras tensigrity
National Project
Start Date: 13/07/2007

These are the most recent publications (2024 - 2023) of the Computational Robotics
-
S. Sarabandi and F. Thomas. On closed-form solutions to the 4D nearest rotation matrix problem. Mathematical Methods in the Applied Sciences, 47(3): 1248-1256, 2024.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
F. Thomas and J.M. Porta. The inverse kinematics of lobster arms. Mechanism and Machine Theory, 196: 105630, 2024.
Abstract
Info
PDF
-
S. Sarabandi and F. Thomas. Solution methods to the nearest rotation matrix problem in R3: A comparative survey. Numerical Linear Algebra with Applications, 2023, to appear.
Abstract
Info
PDF
-
A. Codina, M. Roldán, D. Natera-de Benito, C. Ortez, R. Planas, L. Matalonga, D. Cuadras, L. Carrera, J. Exposito, J. Marquez, C. Jiménez-Mallebrera, J.M. Porta, A. Nascimento and C. Jou. Innovative computerized dystrophin quantification method based on spectral confocal microscopy. International Journal of Molecular Sciences, 24(7): 6358, 2023.
Abstract
Info
PDF
-
F. Thomas and B. Bongardt. Ellipse distance geometry and the design of 3R robots, 16th IFToMM World Congress on Mechanism and Machine Science, 2023, Tokyo (Japan), Vol 147 of Mechanisms and Machine Science, pp. 577-587, 2023, Springer, Cham.
Abstract
Info
PDF
-
B. Bongardt and F. Thomas. On ellipse intersections by means of distance geometry, 16th IFToMM World Congress on Mechanism and Machine Science, 2023, Tokyo (Japan), Vol 147 of Mechanisms and Machine Science, pp. 533-543, 2023, Springer, Cham.
Abstract
Info
PDF
-
F. Thomas. New bracket polynomials associated with the general Gough-Stewart parallel robot singularities, 2023 IEEE International Conference on Robotics and Automation, 2023, London (UK), pp. 9728-9734.
Abstract
Info
PDF
-
R. Bordalba, T. Schoels, L. Ros, J.M. Porta and M. Diehl. Direct collocation methods for trajectory optimization in constrained robotic systems. IEEE Transactions on Robotics, 39(1): 183-202, 2023.
Abstract
Info
PDF
Computational Robotics Laboratory
The COMPUTATIONAL ROBOTICS lab was created to investigate the computational and implementation aspects that arise in the design, construction, and control of complex robotic systems. Among these systems we find serial, parallel, or locomotive robots, intelligent prostheses, biomechanical support systems for movement or rehabilitation, or other robots that, due to their sensory and compliance capacities, can safely interact with humans in an agile manner. The activity of the lab focuses on the analysis and construction of robotic prototypes to validate new algorithms related, but not limited to, positional and singularity analysis, workspace determination, collision detection, forward and inverse kinematics or dynamics, singularity-robust navigation, or planning and optimal control of robot trajectories.


Researchers
-
Franch Bullich, Jaume
 jfranch (at) iri.upc.edu
jfranch (at) iri.upc.edu
-
Perez Gracia, Alba
aperez (at) iri.upc.edu
-
Porta Pleite, Josep Maria
porta (at) iri.upc.edu
-
Ros Giralt, Lluís
ros (at) iri.upc.edu
-
Ruiz de Angulo García, Vicente
ruiz (at) iri.upc.edu
-
Thomas, Federico
thomas (at) iri.upc.edu
PhD Students
-
Moreno Martín, Siro
smorenom (at) iri.upc.edu
Master Students
-
Cervero Pineda, Ignacio
icervero (at) iri.upc.edu
-
Guixà Alberch, Guillem
gguixa (at) iri.upc.edu
TFG Students
-
Casado Puche, Miquel
mcasado (at) iri.upc.edu
Support Staff
-
Pujol Badell, Sergi
spujol (at) iri.upc.edu


Follow us!