
|
|
|
|
Serial6RBricard.world File ReferenceA general Serial6R mechanism. More... Go to the source code of this file. Detailed Description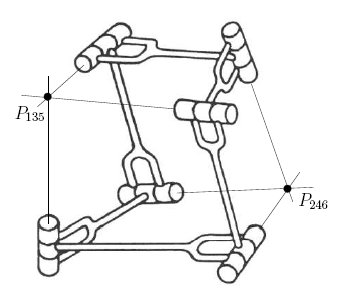
IntroductionA closed kinematic chain consisting of six binary links, connected together by six revolutes is generally rigid, i.e., it can only be assembled in a finite number of different ways. However, if there are certain geometrical conditions imposed upon the relevant linkage parameters (the normal distances, the twist angles and the offsets of the revolutes on each of the links) the chain my be mobile with one degree of freedom. Such 6R loops are said to be overconstrained mechanisms, and one example is "rectangular Bricard chain" shown above [Wohlhart 1987]. The Bricard chain belongs to a larger family of overconstrained 6R loops, characterized by the fact that in every position of the linkage there is a transversal, a straight line that intersects all six revolute axes-lines. In the case of the rectangular Bricard chain, if we number the revolute axis lines from 1 to 6 consecutively, the even numbered ones and the odd numbered ones meet in all positions at points The Denavit-Hartenberg parameters of the Bricard 6R loop are:
ResolutionSee DoubleButterfly for an extensive step-by-step explanation of how to perform position analysis and path planning within the CuikSuite. Next, we briefly enumerate those steps:
References
Definition in file Serial6RBricard.world. |
 and
and  , respectively
, respectively 


