|
Calibration of non-overlapped camera
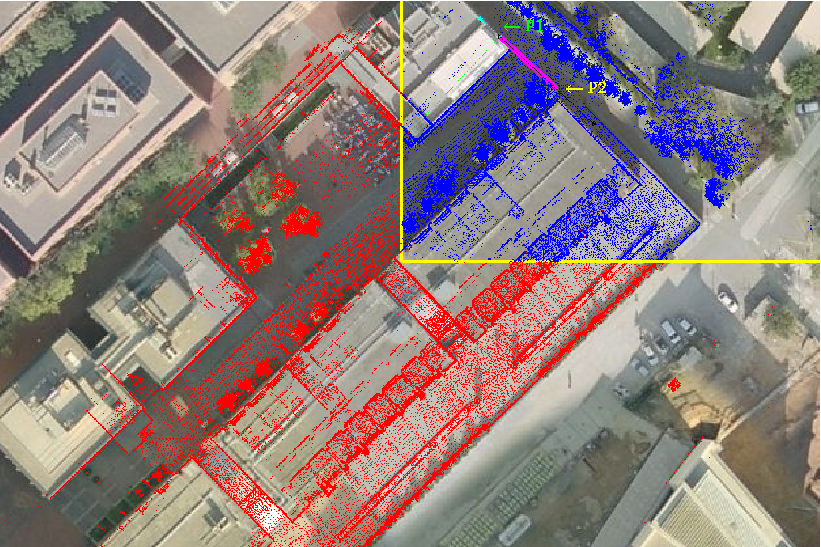
network using lidar data We propose the utilization of Laser Range Finder (LRF) data covering the area of the camera network to support the calibration process and develop a semi-automated methodology allowing quick and precise calibration of large camera networks. The proposed methods have been tested in a real urban environment and have been applied to create direct mappings (homographies) between image coordinates and world points in the ground plane (walking areas) to support person and robot detection and localization algorithms. More details in the paper published in IROS09 |
|
|
Calibration explanation |
3d data laser points used for calibrating camera network |
|
3D segmentation using 3d point clouds
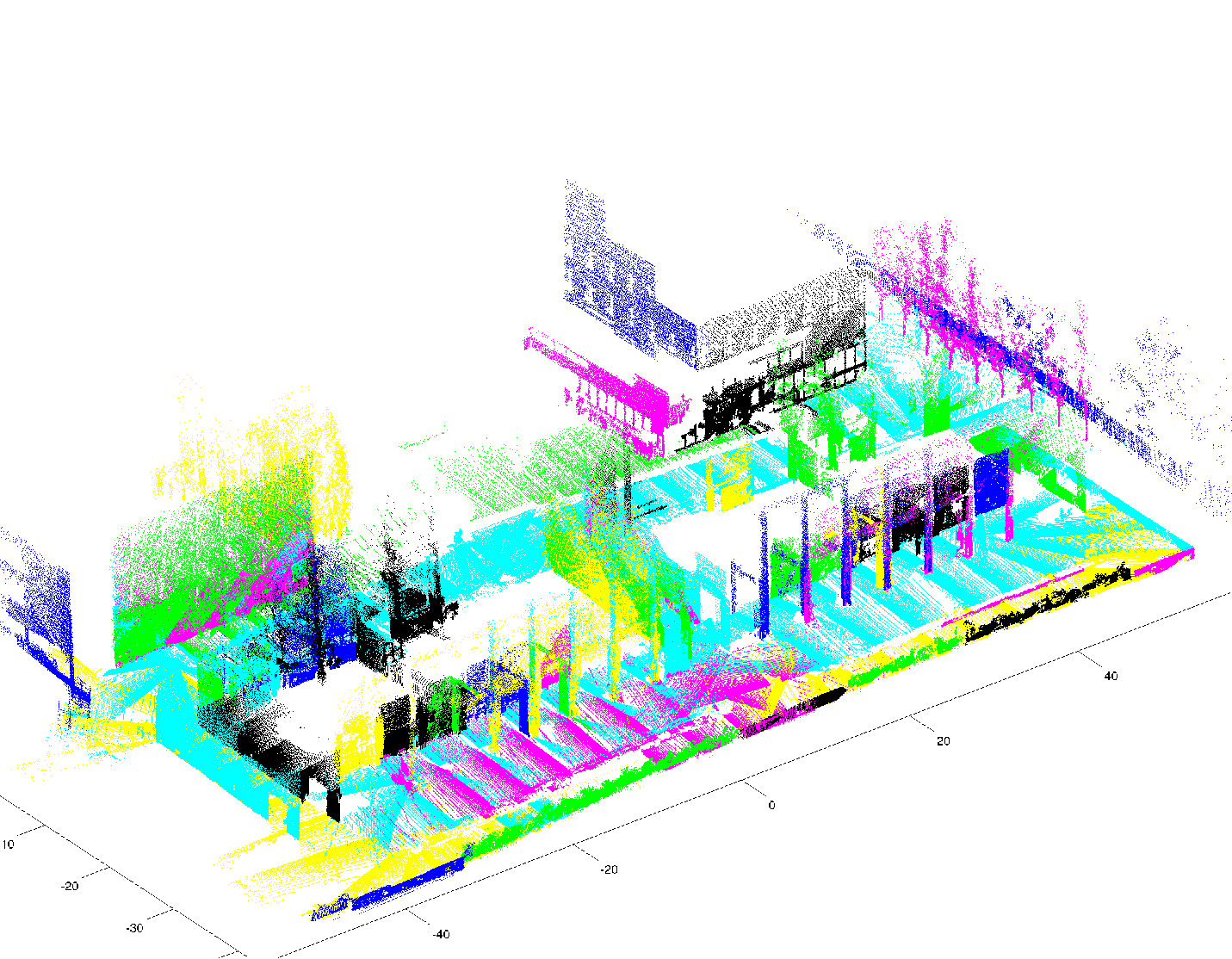
Segmentation of planar surfaces in urban scenarios is challenging because the data acquired is typically sparsely sampled, incomplete, and noisy. The algorithm is motivated by Felzenszwals's algorithm to 2D image segmentation; and is extended to deal with non-uniformly sampled 3D range data using an approximate nearest neighbor search. Inter-point distances are sorted in increasing order and this list of distances is traversed growing planar regions that satisfy both local and global variation of distance and curvature. The algorithm runs in O(n log n) and compares favorably with other region growing mechanisms based on Expectation Maximization. A pair of applications of the segmented results are shown, a) to derive traversability maps, and b) to calibrate a camera network. More details in the paper published in ECMR09 |
|
|
Segmentation explanation |
Dataset used for segmentation |
|
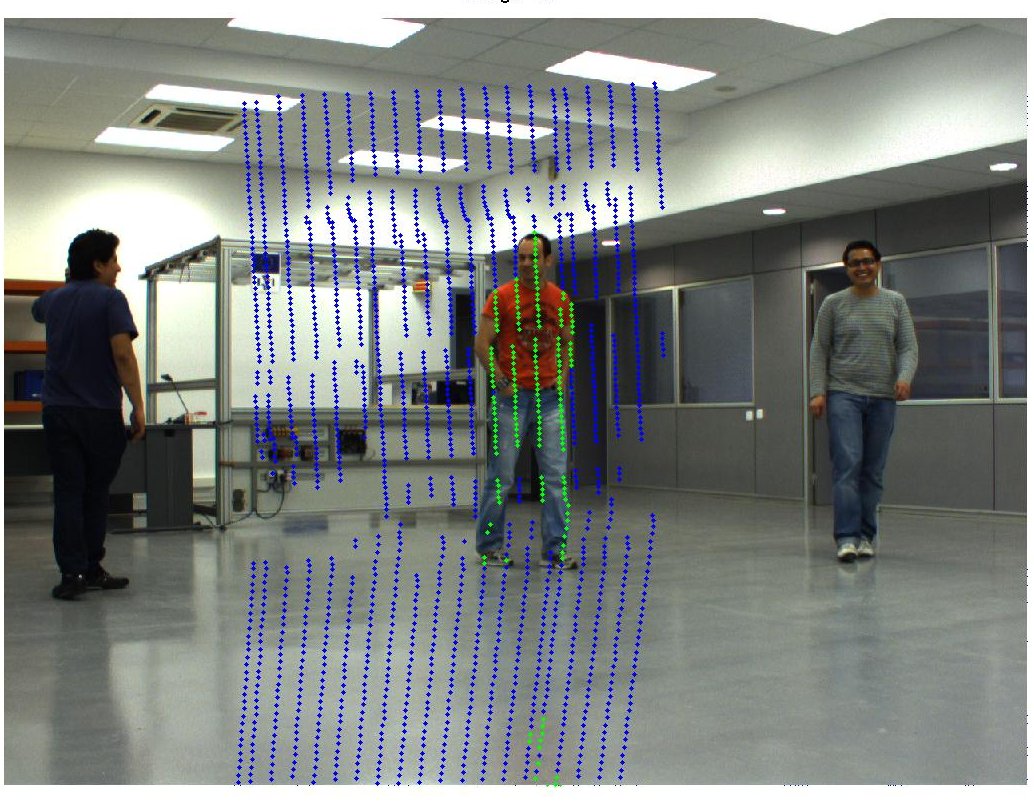
Segmentation of dynamic objects using laser and cameras We present a method to segment dynamic objects from high-resolution low-rate laser scans. Data points are tagged as static or dynamic based on the classification of pixel data from registered imagery. Per-pixel background classes are adapted online as Gaussian mixtures, and their matching 3D points are classified accordingly. Special attention is paid to the correct calibration and synchronization of the scanner with the the accessory camera. Results of the method are shown for a small indoor sequence with several people following arbitrarily different trajectories. More details in the paper published in ECMR11 |
 |
|
Segmentaing a sequence |
Camera calibration |
|
Objects segmented |
Indoor points cloud |
|
Dynamic object detection in lidar data My research is finding methods that can detect dynamics objects given 2 points clouds of the same scene. We are focused in segment object in dynamic scenes with a mobile platform. |
 |
|
Calibration and detectiong automatic chessboard |
Segmenting dynamic objects on points clouds |