~John Von Neumann
| Home |
| Publications |
| PhD Thesis |
Jan. 2018 - Present: Associate researcher at IRI, Barcelona,
working at the ERC advanced grant CLOTHILDE.
May 2014: Best
Reviewer Award at the IEEE
International Conference on Robotics and Automation.
Feb. 2014 - Dec.2017: Researcher at High
Perfomance Humanoid Technologies Lab (H2T),
Karlsruhe Institue of Technology.
Nov. 2011- Jul. 2013: Researcher at Yale
University, as a research associate at the GrabLab.
May 2011: PhD on Robot
Kinematics: "Singularity-invariant leg
rearrangements in Stewart-Gough platforms", advisor: Federico Thomas.
2007-2011:PhD
Student at Institut de Robòtica i Informàtica Industrial
(IRI), (CSIC-UPC).
2006:Technical Engineering Degree in Computer
Science.
2004: Degree in Mathematics
Click here for my
Google Scholar Profile.
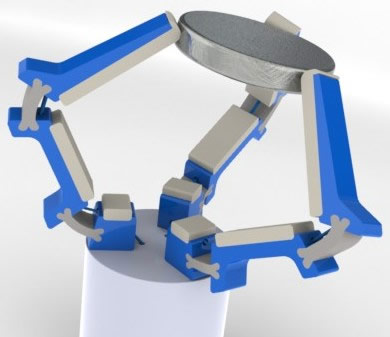
During my PhD, I got experience working on parallel
manipulators and their geometric design. For more
information about applications and prototypes, visit IRI's
Laboratory
of Parallel Robots. Visit the Thesis section for a summary
of my PhD. Now you can download
my thesis here!
My first postdoc, at the GrabLab, Yale University, I applied my knowledge about parallel robots to the kinetostatics of hands holding objects with precision grasps, that have similar structure to a parallel manipulator. For hands, the legs are the fingers and the platform the object being manipulated.
During my postdoc at the High Perfomance Humanoid Technologies Lab (H2T), I worked on several approaches to transfer properties of grasping to whole-body support poses using multi-contacts, that share similar structure than a hand holding an object, in this case, the hand is the robot and the object is the environment. I also worked on innovative gripper designs.
In 2018 I returned to IRI, and I have been working on cloth manipulation focusing on grasping, scene state estimation and planning. In 2019 I won the Ramon y Cajal scholarship and in summer 2020 I started my new position as a permanent research assistant.
Institut de
Robòtica i Informàtica Industrial
Parc Tecnològic de Barcelona. C/ Llorens i Artigas 4-6,
08028, Barcelona, Catalonia
jborras at iri dot upc dot edu

Recent works
Check out my talks at the recently presented International Conference
A Versatile Gripper for Cloth Manipulation. Watch the talk here!
From the paper S. Donaire, J. Borràs, G. Alenyà and C. Torras. A versatile gripper for cloth manipulation. IEEE Robotics and Automation Letters, 5(4): 6520-6527, 2020.
A Grasping-Centered Analysis for Cloth Manipulation. Watch the talk here!
From the paper J. Borràs, G. Alenyà and C. Torras. A grasping-centered analysis for cloth manipulation. IEEE Transactions on Robotics, 36(3): 924-936, 2020.
Check out my Science Robotics paper!!
Free access from my publications page!

My career at a glance
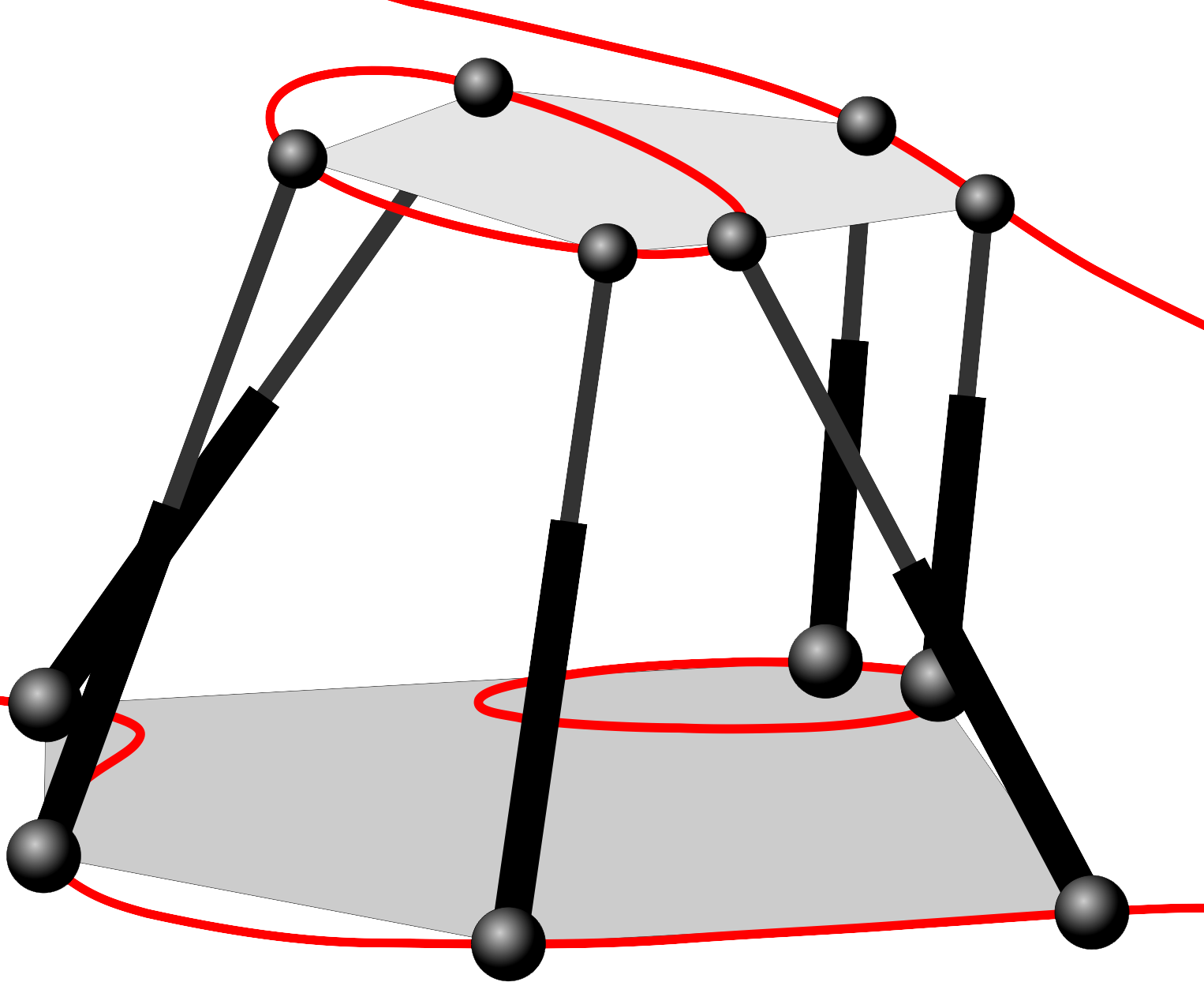
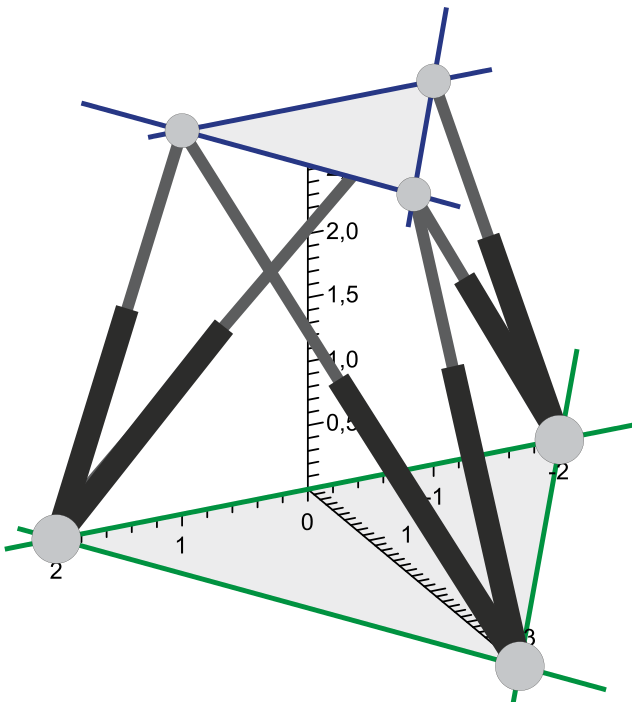
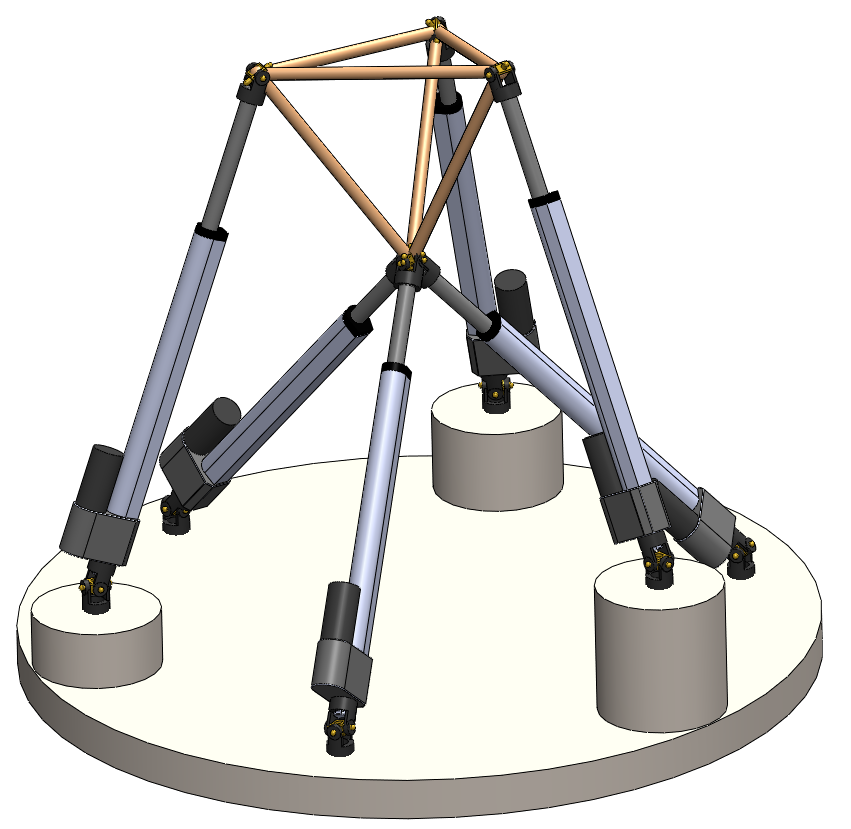
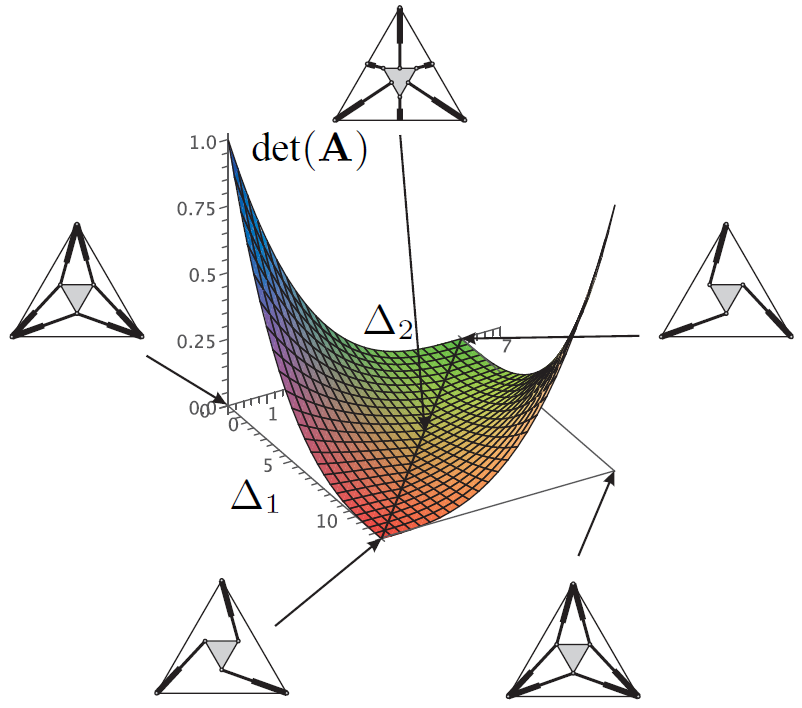
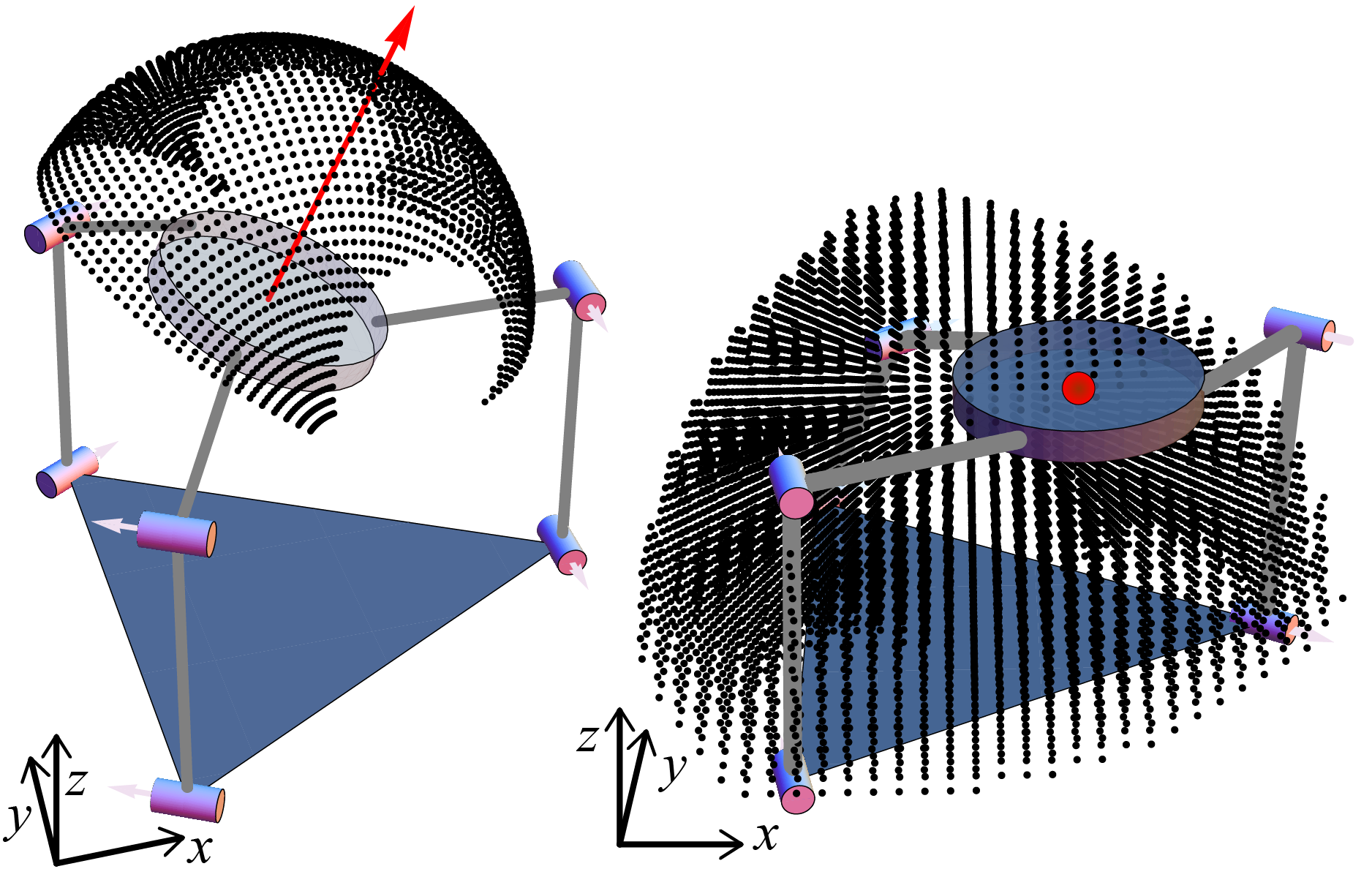
From parallel robotsGeometrical design of Stewart-Gough platform. Geometries with generic architecture but simplified kinematics and singularties.
Decoupled SGP and implementation of the Octahedral SGP without multiple joints
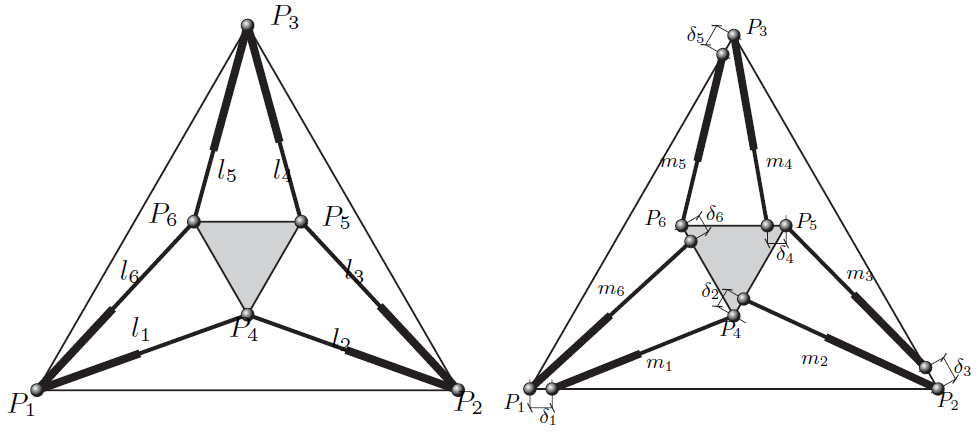
Singularity invariant reconfigurations of the octahedral SPG
|
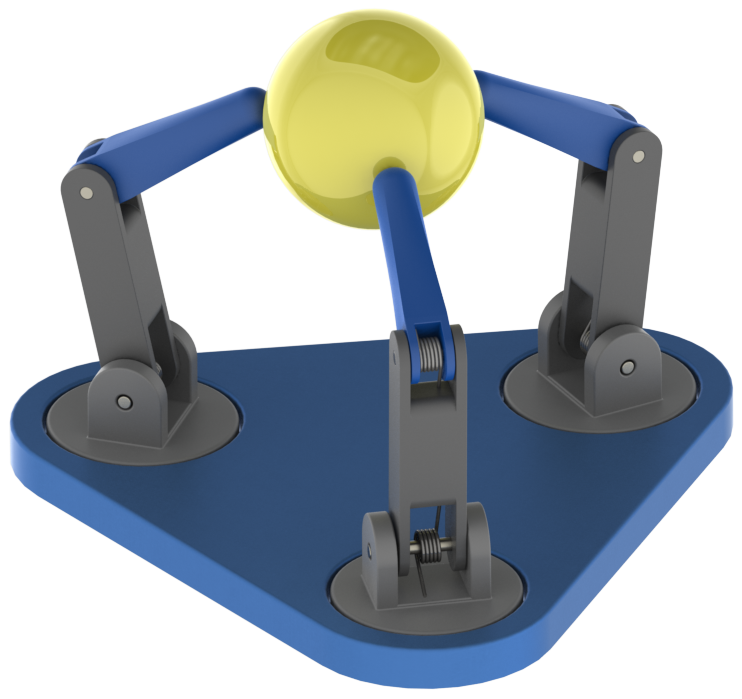
To robotic hands holding objectsEquivalence between the 3-URS and 3-UR fingered robotic hand
Influence of the compliant joints in parallel platform/hands workspaces
Dexterous manipulation workspace of underactuated hands
|
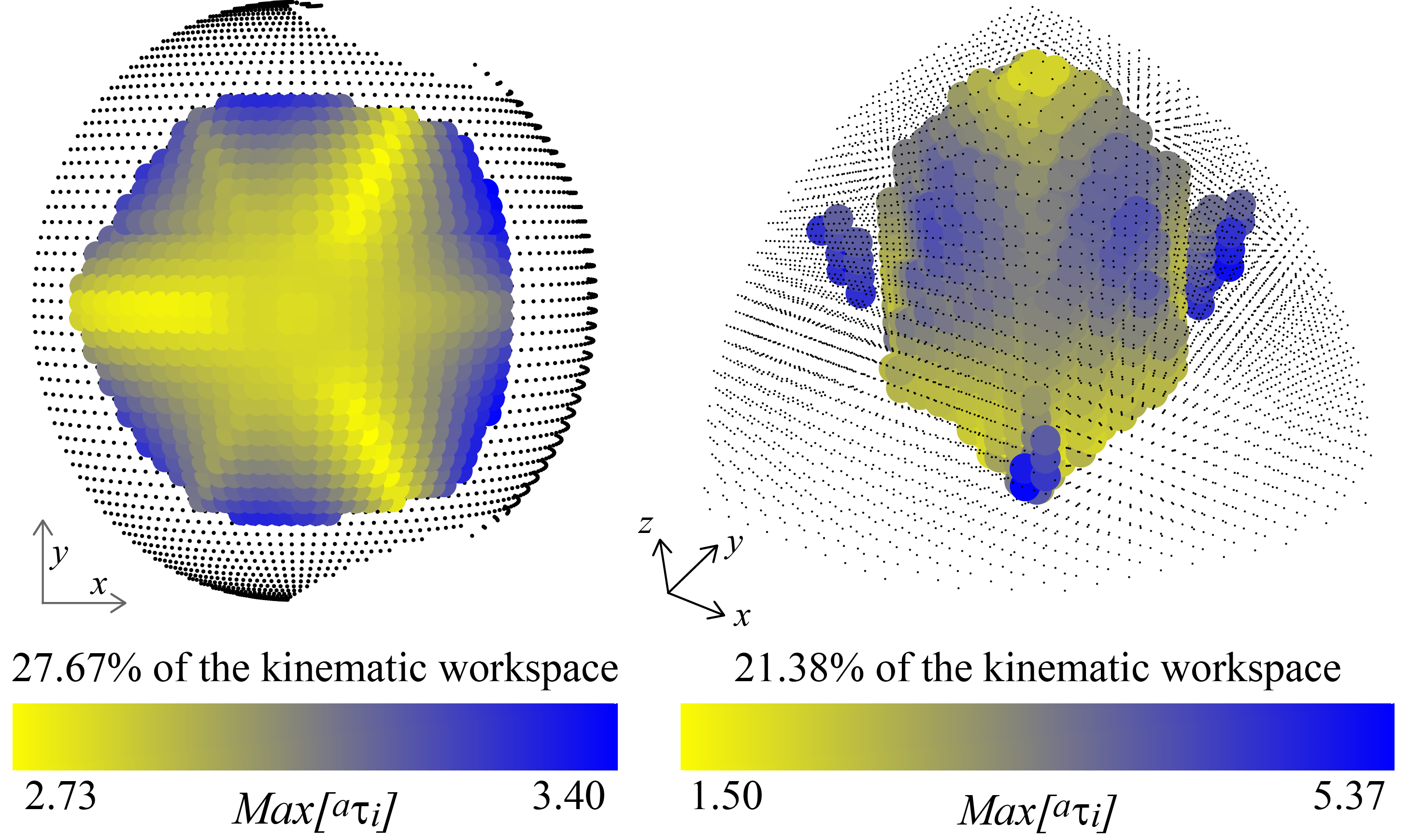
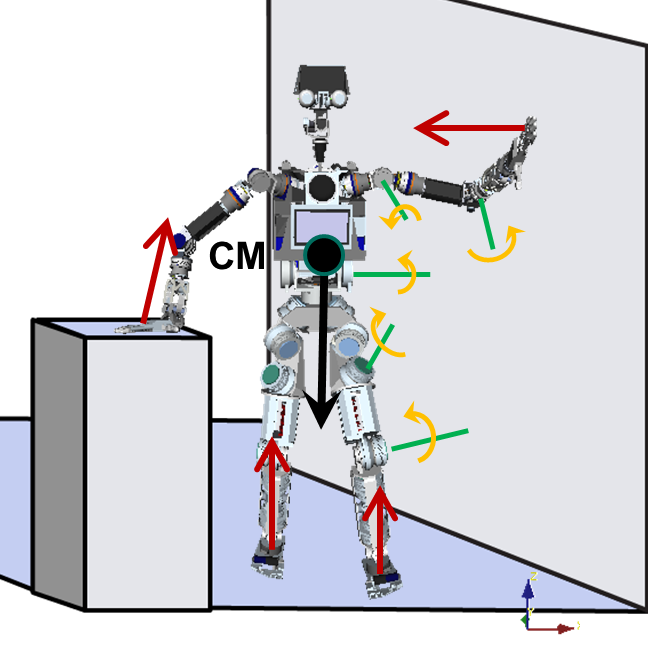
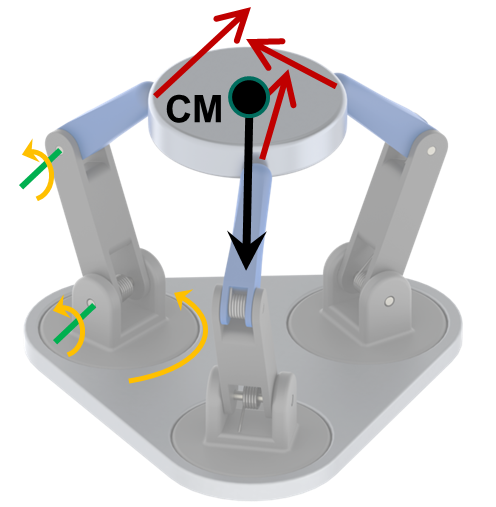
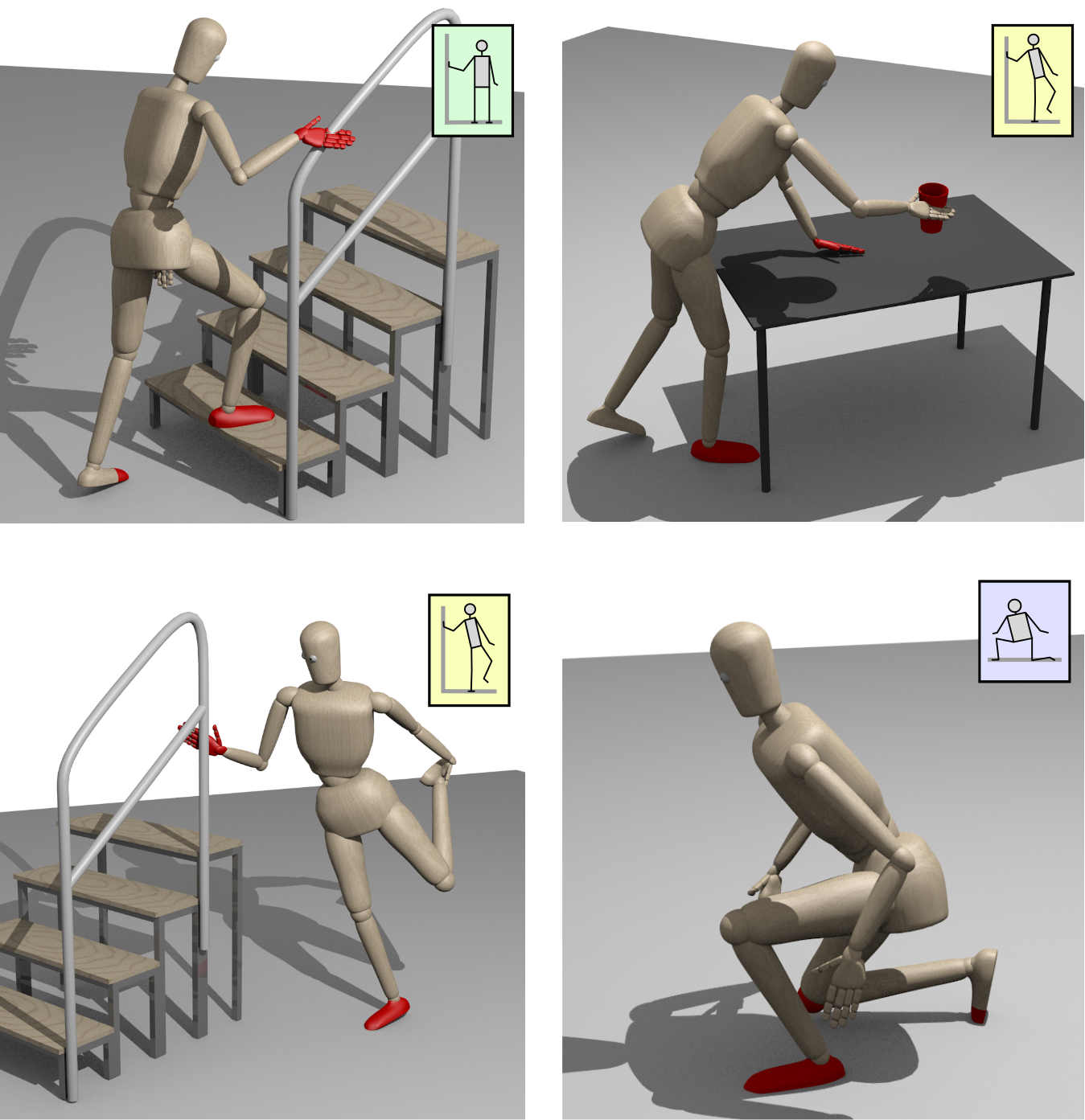
To whole-body postures with multi-contactsConnections between grasping and whole-body posture balance with multi-contacts
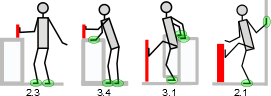
Automatic detection of body support contacts from motion data
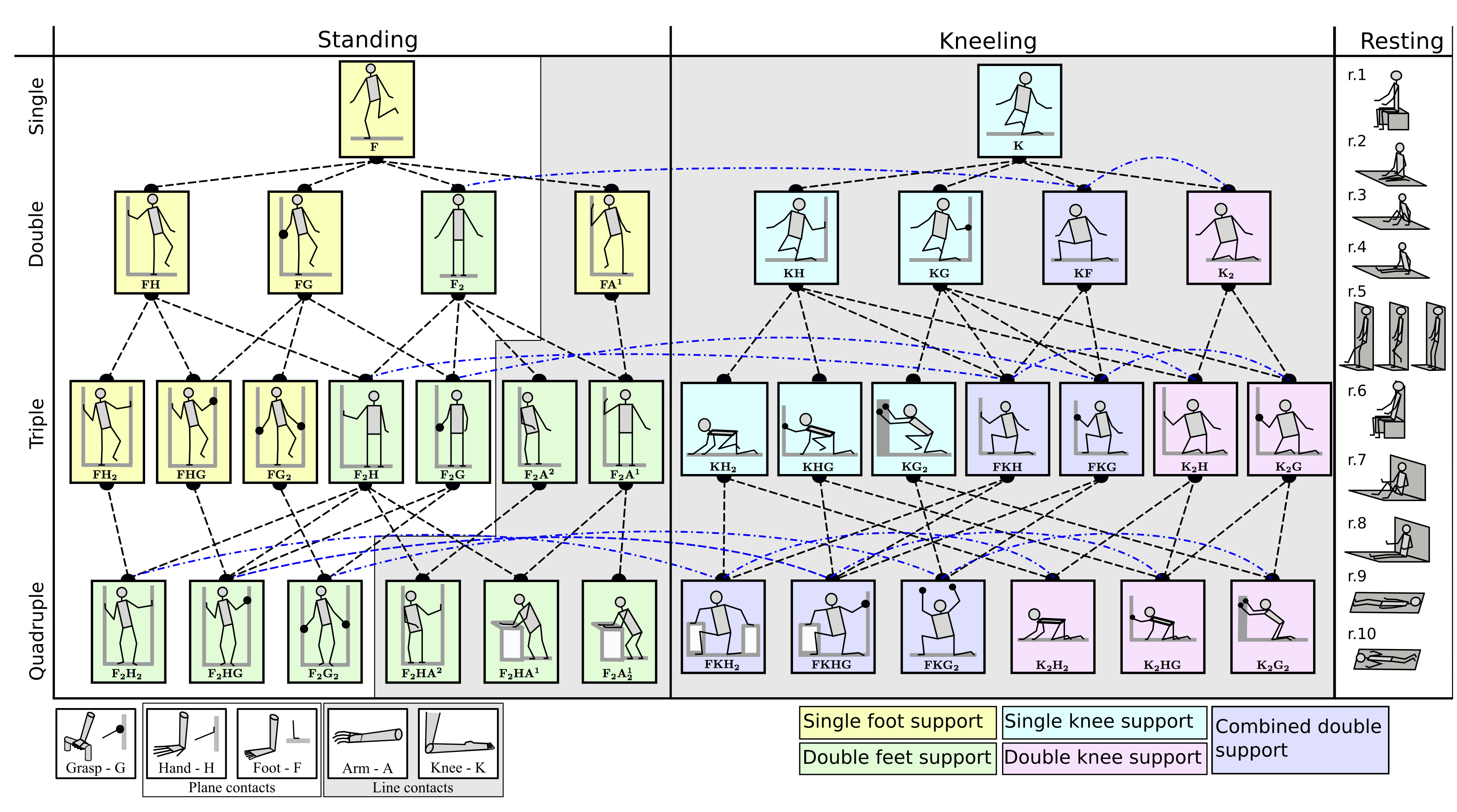
Taxonomy of Whole-Body Support Poses (click to make bigger)
|