
|
|
|
|
Griffis-Duffy.world File ReferenceAn architecturally singular 6-6 parallel platform. More... Go to the source code of this file. Detailed Description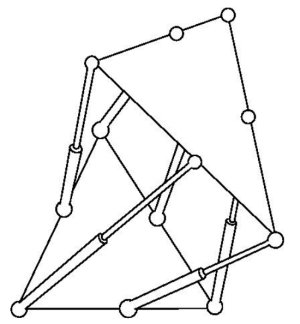
IntroducionFor a general Stewart-Gough platform, once the lengths of all legs are fixed, the entire structure becomes rigid (although the same lengths may be compatible with up to 40 endplate locations). In the special case above, however, any choice for such lengths makes the endplate mobile with one degree-of-freedom [Husty and Karger 2000]. This linkage is actually a sub-case of the so-called Griffis-Duffy platform, a parallel platform invented by M. Griffis and J. Duffy [Griffis and Duffy 1993], whose special geometry allows a closed-form solution for its direct kinematic problem, with the advantage of having all of its spherical joints separated (which facilitates its physical construction). GeometryIn [Griffis and Duffy 1993] the authors propose two types of mechanisms, referred to as the "midline to apex" and "apex to apex" embodiements. The linkage of this benchmark is a special case of the "midline to apex" embodiement. Specifically, the base and platform bodies must be equilateral triangles, and every leg connects one vertex of a triangle with an edge midpoint of the other triangle, as shown in the figure above. Provided the mechanism can actually be assembled, any leg lengths will let the one-dimensional self-motion occur. The geometric parameters of this parallel platform are (the leg lengths computed by randomly placing the top platform):
References
Definition in file Griffis-Duffy.world. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||