
|
|
|
|
ParallelPlatform Directory ReferenceA couple of 6-6 parallel robots. More...
Detailed Description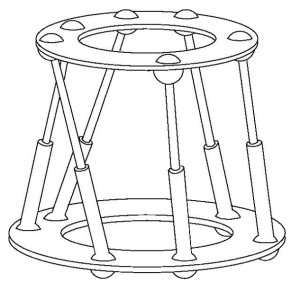
IntroductionThis device is a generalization of a mechanism originally proposed by Stewart as a flight simulator. It consists of two rigid bodies, a fixed "base" and a moving "platform", which are held fixed one to the other by means of six legs. The legs are connected to the base and platform bodies via spherical joints, and their lengths can be changed by means of linear actuators. No further geometric constraints are assumed for the device. In particular, the base and platform joints need not be coplanar. While the inverse kinematics of this mechanism is straightforward (given the platform pose, derive the leg lengths) the converse problem (given the leg lengths, derive the platform pose) is by no means trivial and can have many different solutions. In fact, for a long time, it has been considered one of the most difficult problems of robot kinematics. Geometry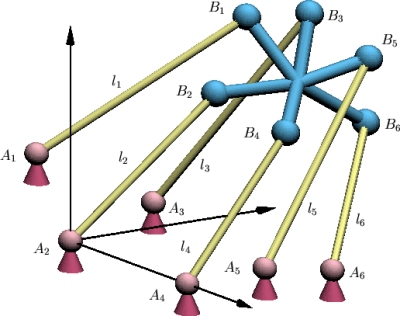
The geometry of a parallel platform is given by the leg lengths FormulationsThis directory includes formulatins for two different parallel platforms:
| ||||||||||
 and by the anchor points of the legs on the base
and by the anchor points of the legs on the base  and on the platform
and on the platform  , for
, for  .
.