
|
|
|
|
MarylandManipulator Directory ReferenceThe Maryland parallel manipulator. More...
Detailed Description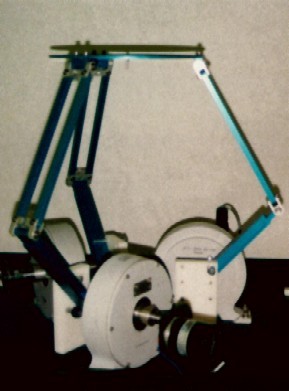
Image taken from John M. Maloney web page. IntroductionThe Maryland parallel manipulator is a 3 degrees-of-freedom parallel platform designed by Prof. Lung-Wen Tsai at the University of Maryland The key idea in the design is the use of parallelograms (i.e., four bar mechanisms) in each leg to constraint the movement of the platform to only translational degrees of freedom. Note that the design is very similar to that of the Delta robot but here only revolute joints are used to define the leg parallelograms. In the Delta robot spherical joints are used and, thent the parallelograms are not enforced to be coplanar. GeometryThree identical limbs connect the base and the platform. Each leg is formed by a lower arm and an upper arm connected between them with a revolute joint. The lower limb is simple bar and the upper limb is made up of a plannar four-bar parallelogram. The lower and upper arms are connected to the base and platform with revolute joints, respectively. The axes of the revolute joints at the base and at the platforma are coplanar. Moreover, the three axis of the three revolute joints for each leg (the one connecting the lower limb and the base, the one connecting the two limbs, and the one connecting the upper limb and the platform) are parallel. Finally, the axes of the four-bar mechanism forming the upper limb are perpendicular to the plane defined by two axes of the revolute joints linking the parallelogram to the lower limb and the platform. In the simplest possible version of this mechanism, the platform parameters are the lengths of the limbs and the the anchor points of the legs at the base/platform. The axis of the revolute joints connecting the base and the legs can be taken as tangent to the circunference inscribing the triangle formed by the anchor points. See [Tsai, 1999] for a complete description and analysis of this mechanism. FormulationsThe formulation for this parallel mechanism is given in MarylandManipulator.world. References | ||||||