
|
|
|
|
Wunderlich Directory ReferenceThe Wunderlich mechanism. More...
Detailed Description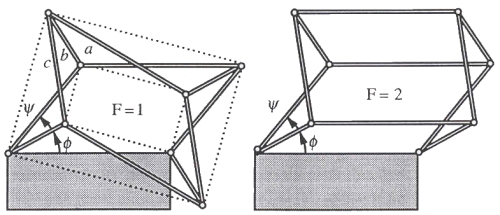
Introduction(courtesy of Karl Wohlhart) In 1954 Walter Wunderlich published a paper [Wunderlich, 1954] in which he describes a planar twelve-bar mechanism with six parallelogram or antiparallelogram loops which can be arranged in four different closure modes, all of them movable with either one or two degrees of freedom. What makes this mechanism especially remarkable is the fact that by passing a singularity position the mechanism might change its movability. In that case the singularity position is, therefore, not a bifurcation position, but a sort of mobility turning position. The figure above shows Wunderlich's mechanism in two different positions. In the position in which it has two parallelogram and four antiparallelogram loops, the mechanism is movable with mobility 1 because the two angles
wherein
are the system parameters. In the position, however, in which Wunderlich's mechanism has four parallelogram and two antiparallelogram loops, its mobility is 2, as GeometryThe Wunderlich we formulate has
FormulationsThis directory only includes one formulation of the Wunderlich with the parameters given above
References | ||||||
 and
and  are related by the equation:
are related by the equation: ![\[ \tan^2 \frac{\Psi}{2} \: k_2 \: [1 - k_1\: \tan^2 \frac{\Phi}{2}]+ \tan \frac{\Psi}{2} \tan \frac{\Phi}{2} \: (1+k_1+k_2+k_1 k_2) + k_1 \:\tan^2\frac{\Phi}{2} -1 =0. \]](form_56.png)
![\[k_1 = \frac{a + b}{a - b},\]](form_57.png)
![\[ k_2=\frac{c + b}{c - b} \]](form_58.png)
 and
and  can be chosen arbitrarily. The passage from one position to the other goes smoothly through a singularity position (
can be chosen arbitrarily. The passage from one position to the other goes smoothly through a singularity position ( ). The Wunderlich Mechanism, therefore, belongs to the category of kinematotropic linkages.
). The Wunderlich Mechanism, therefore, belongs to the category of kinematotropic linkages.