|
3R.world File Reference Detailed Description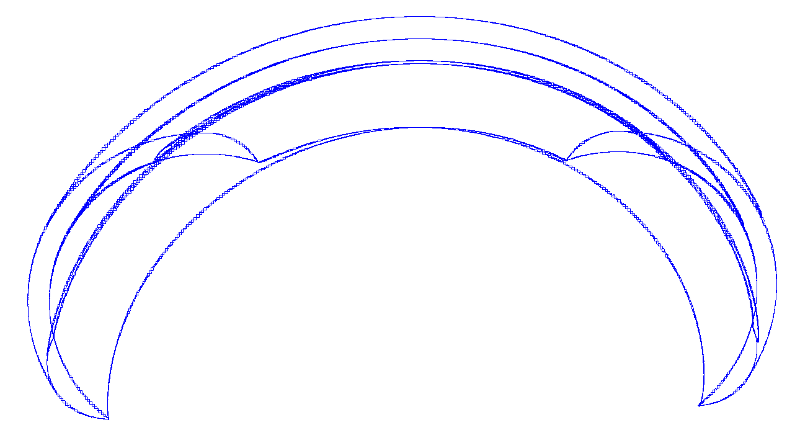
Determining the workspace boundaries of a 3R planar robot. You can get an idea of the workspace to bound executing;
The point to track is the one in green. Each red dot is a revolute joint, where all rotation axis are parallel. 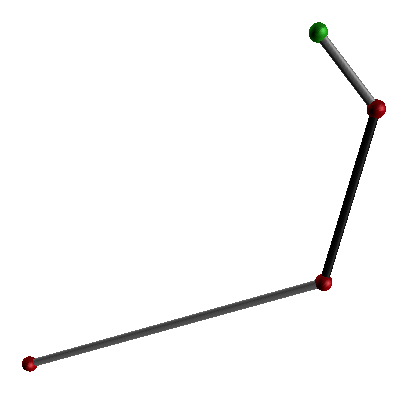
To process this problem you have to generate the equations executing either
or
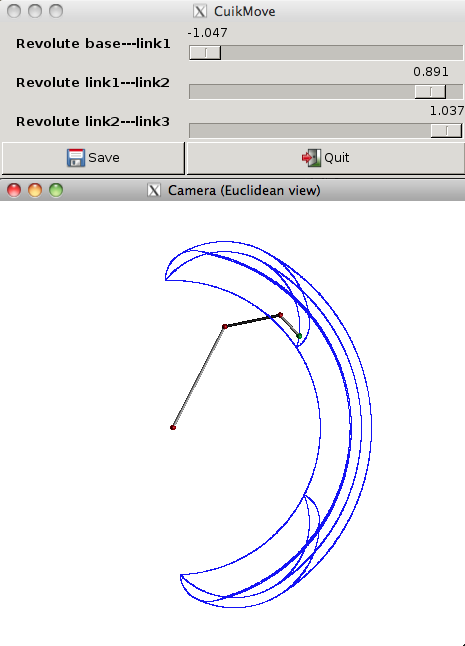
The output is a set of one-dimensional curves that bound the translational workspace of the robot. In both cases the process takes about 3 minutes and generates about 4800 boxes bin/cuiksimplify and bin/cuikaddjacobian are intended to be tools to define the equation set to analyze the singularities on any subset of variables. The workspace boundaries are singularities on the varariables giving the position of the end effector link. bin/cuikTWS is a tool specific to generate the equations characterizing translational workspaces. In both cases the execution takes about 200 seconds and generate about 4800 solution boxes. In both cases you will get a planar plot of the translatinal workspace of the interest variables (the area reachable for the end effector, that is a particular point on the last link of the robot). To obtain a 3D plot you can execute:
or
and then visualize the output
Definition in file 3R.world. |
Follow us!