
|
|
|
|
Wheelie Directory ReferenceThe Wheelie family of mechanisms. More...
Detailed Description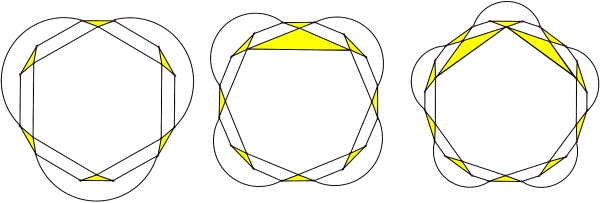
IntroductionAll members of the Wheelie family have two particularities:
The first property derives from the fact that the linkage graphs are planar and triconnected and, by the Owen-Power theorem, this implies their solution cannot be found by ruler-and-compass methods [Owen 2007]. The second property can be proved by showing that such graphs only contain a single triconnected component. Thus, solvers based on ruler-and-compass methods or on modular kinematics cannot solve such linkages. Therefore, the Wheelie linkages are a perfect scalable testbed for general position analysis algorithms. Geometry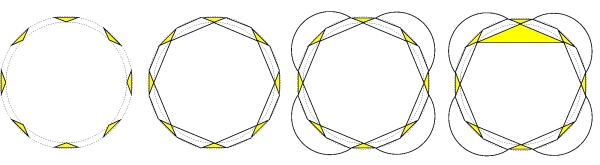
As it can be seen in the figure above, a T-Wheelie linkage is formed by a loop of T equally sized isosceles triangles generated from two concentric circles and where the triangles are connected with the following pattern:
FormulationsThis directory includes the following Wheelie mechanisms:
In all cases we use the implicit formulation (i.e., refering to the joint articulation points using the points defining the triangles) assuming that points 0 and 1 of the triangles are those on the external circle and point 2 is on the internal one. References
| ||||||||||||||||||