Research line
PERCEPTION AND MANIPULATION
Manipulators or robot arms
The manipulators currently at work in the Perception and Manipulation Lab include two Barrett WAM arms and one KINOVA Gen3 robot.
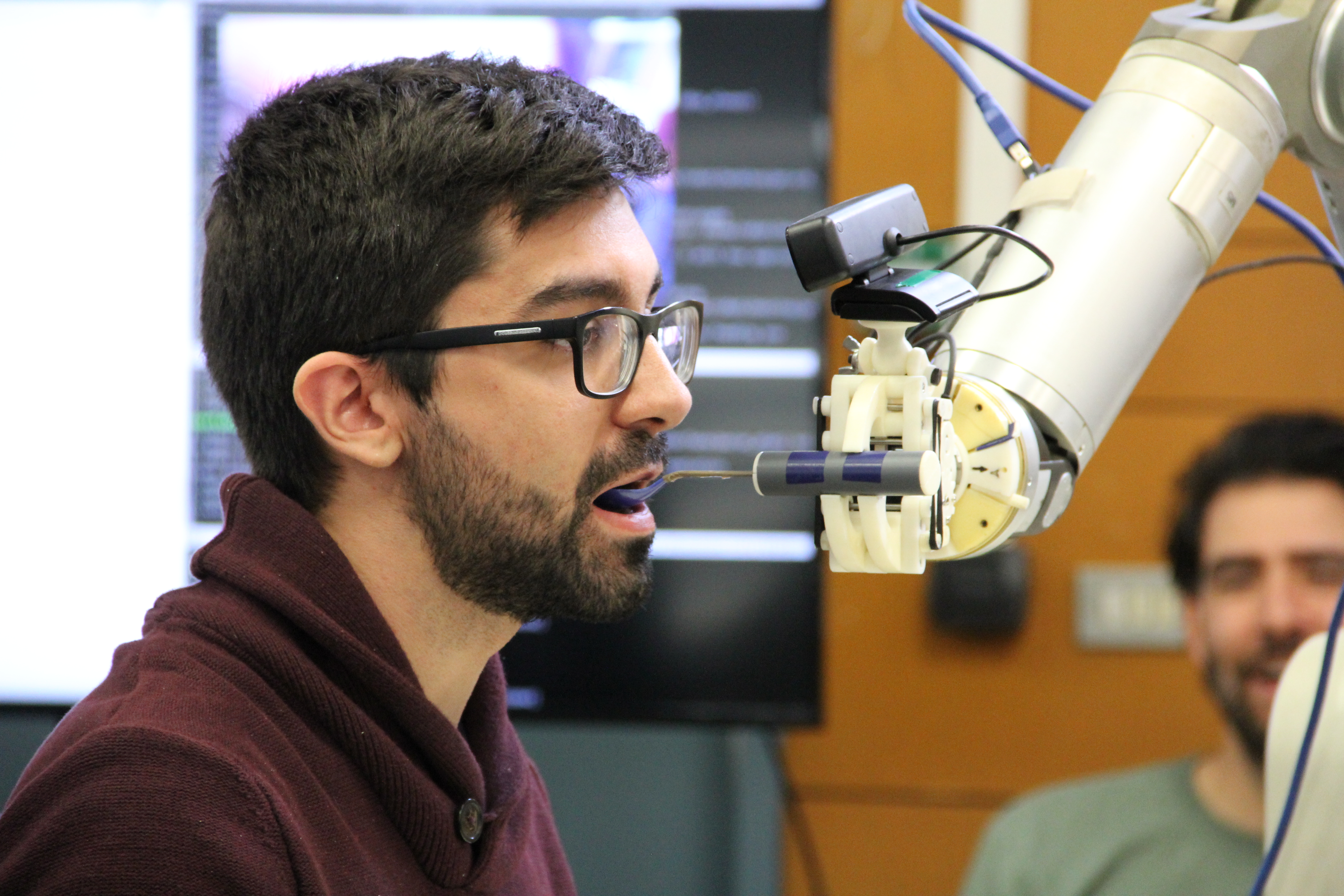
The WAM manipulator is a 7 DoF robot arm which differs from conventional manipulators in its high dexterous and naturally backdrivable capabilities. These features are provided by its 270 degrees average joint range, its high torque, low mass, lower rotor inertia, servo motors, and its inherently backdrivable direct cable drives. Force control algorithms have been developed in our research group that allow to halt the robot during execution of a trajectory at any time by pushing anywhere along the arm, permiting the robot to resume its trajectory once the force ceases. This, together with its lightweight design, makes such robots ideal for safe HRI. More information about these manipulators can be found in the manufacturer's website. We have also the gripper provided by the same manufacturer, the Barrett hand, as described in the grippers page. These arms have been uses for research in human feeding, garment folding and dressing assistance.

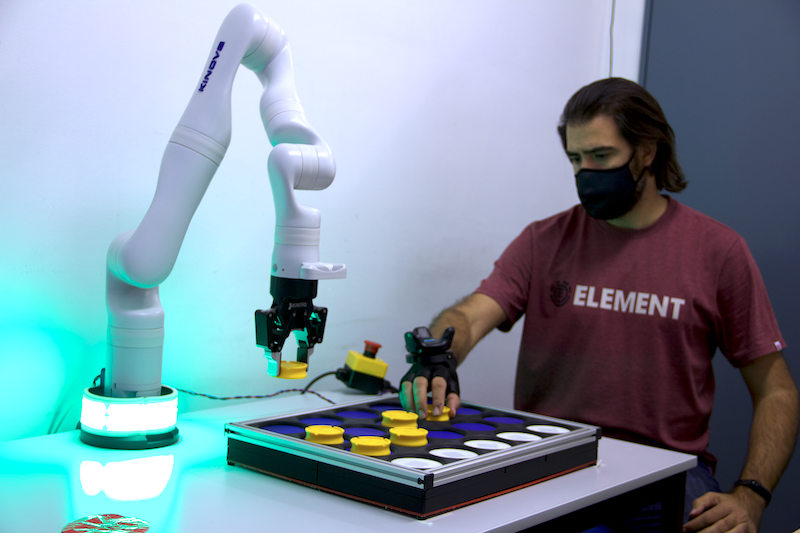
The KINOVA Gen3 manipulator is an ultra lightweight robot (8.2 kg, for a full-range continuous payload of 2 kg --without gripper), with a maximum range of 902 mm. It is well-suited for research thanks to its open API software, that integrates ROS, MATLAB and Simulink packages, Gazebo and MoveIt simulation environments, and programming in C++ and Phyton. This robot arm is mainly used for human-robot collaboration in mixed workteams.


Follow us!