Research line
PERCEPTION AND MANIPULATION
Grippers
Central to manipulation is grasping. Our robots are equipped with grippers, either the commercial ones provided by the correspoding manufacturers, or special ones developed and built in our workshop for specific purposes.
The TIAGo robots and the KINOVA Gen3 robot arm come with their own two-finger jaws. These grippers are sometimes being replaced by our special-purpose grippers.


The BarrettHand is a multifingered gripper developed by Barrett. It is reconfigurable online, meaning that its three fingers (8 DoF in total) can place themselves in different locations on the base, attaining diverse grasping configurations.



We have also acquired the multifingered anthropomorphic hand Hey5 from PAL robotics, which can be mounted on the arm of a TIAGo robot. It is an underactuated hand, meaning that its 19 joints are driven by just 3 actuators.

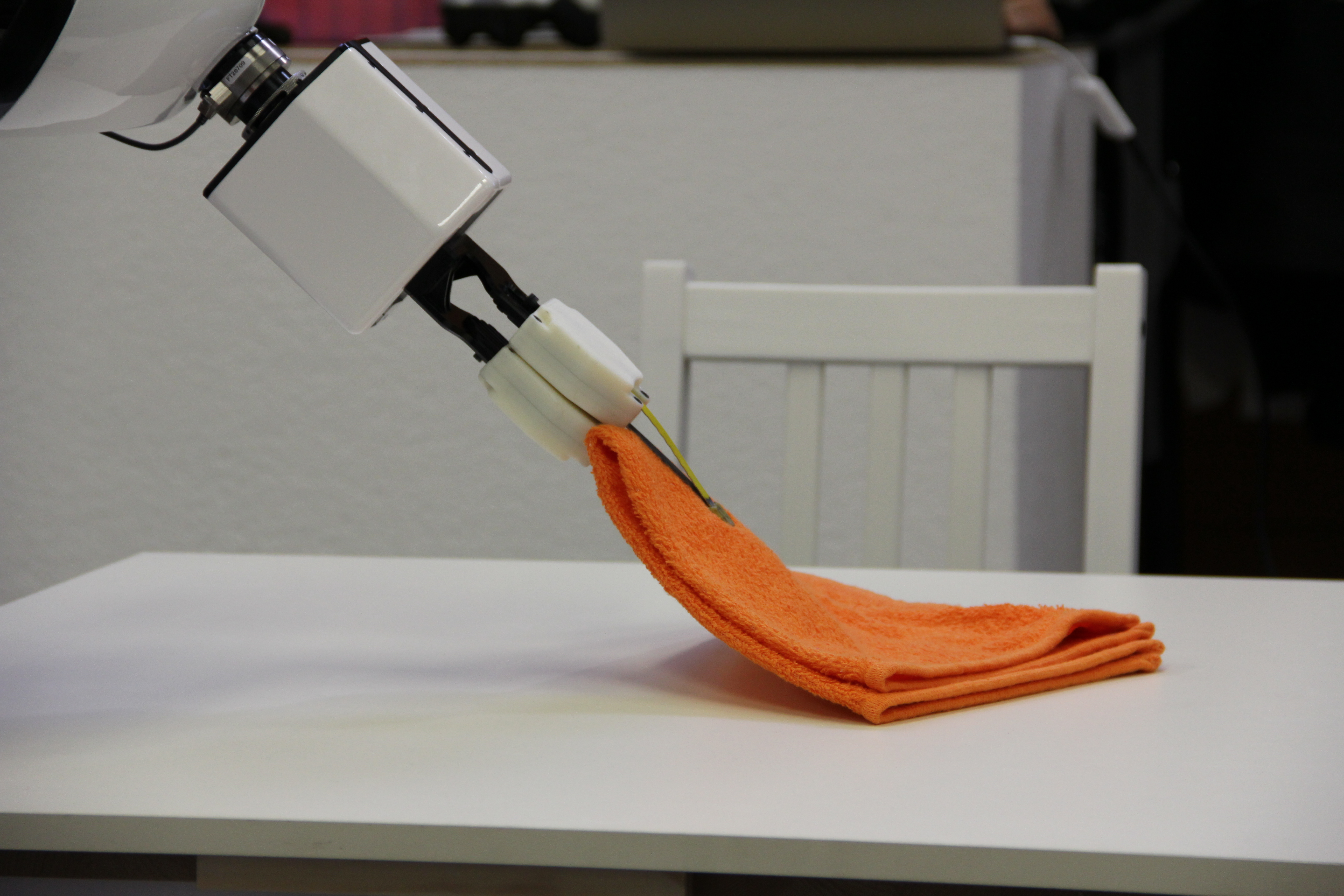
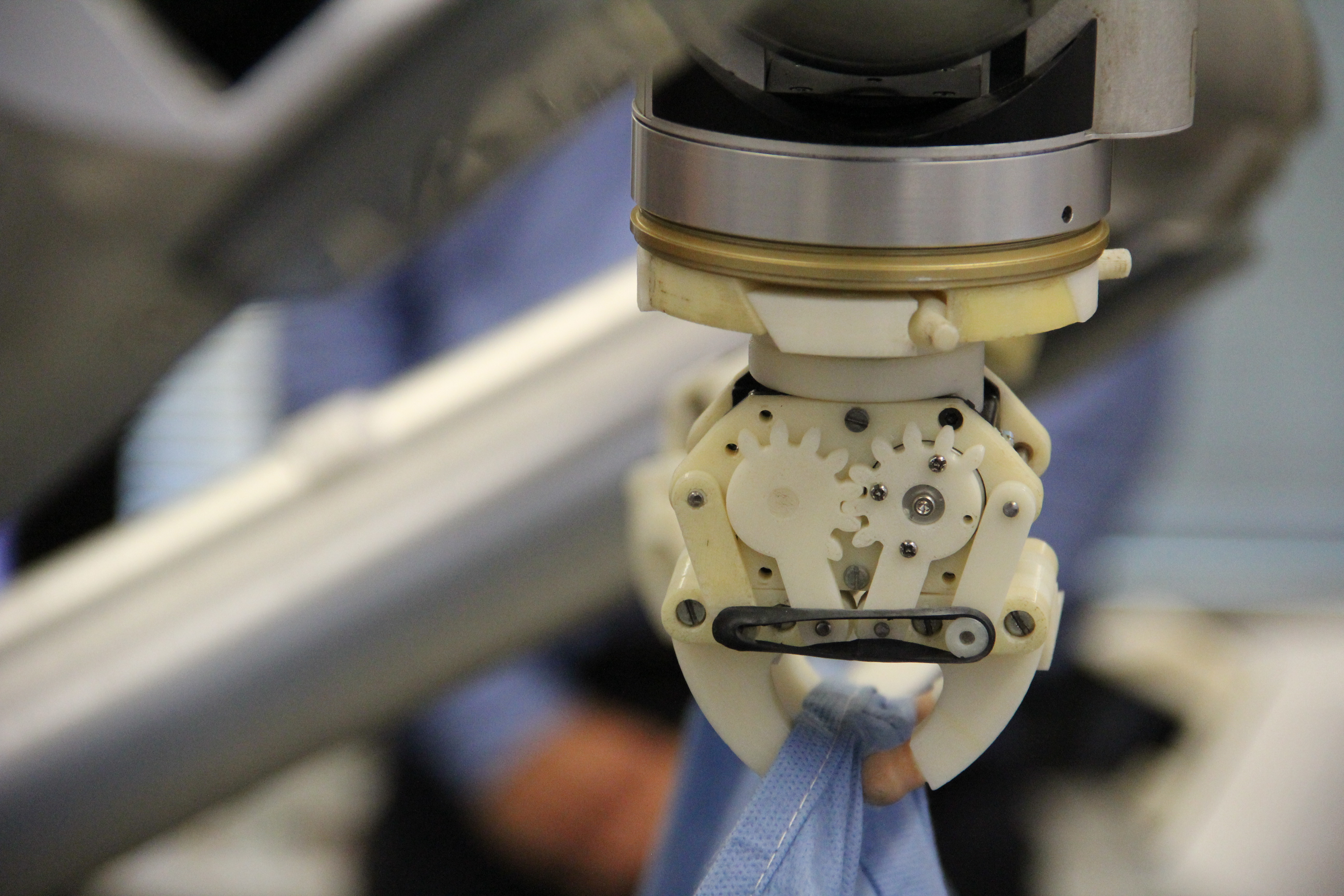
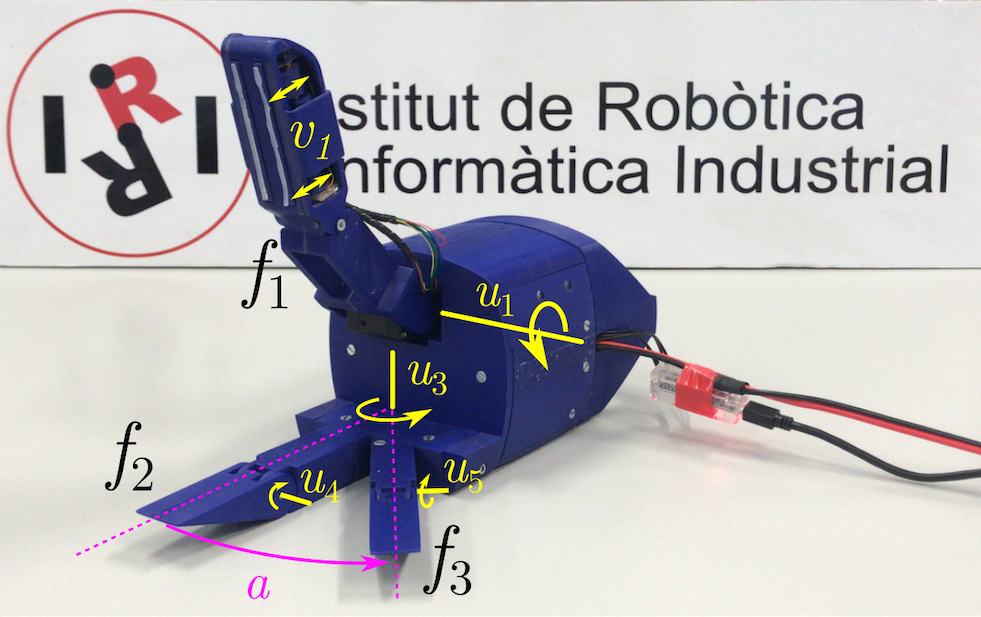
We have developed and constructed our own grippers for special purposes, mainly the tricky grasping of fabrics. Some of these enhancements and designs are pretty simple, as for example thin suplements for the fingers of a commertial gripper, or 2-jaw grippers with a rubber band that ensures the closed-position of the gripper (this avoids to rely on force control to ensure grasps without slippage), and double fingered jaws (i.e. two parallel fingers on one or both sides) so that segment contacts instead of point contacts are achieved (this enables a better controllability when manipulating stuff like fabrics). More sophisticated is the reconfigurable gripper design with three fingers: On the one side there is a finger with a controllable friction device (that is, achieving high friction to avoid slippage of grasped cloth, or low friction when slipping between fabric sheets, for example), and opposed to this finger there is couple of fingers where one of them is fixed (providing higher solidity to the whole device), and the other one has a lateral abduction-adduction motion that allows the couple of fingers to go from a linear to a plane contact. More details about this gripper can be found in Donaire et al.





Follow us!