Research line
Perception and Manipulation

The research of PERCEPTION AND MANIPULATION group focuses on enhancing the perception, learning, and planning capabilities of robots to achieve higher degrees of autonomy and user-friendliness during everyday manipulation tasks. Some topics addressed are the geometric interpretation of perceptual information, construction of 3D object models, action selection and planning, reinforcement learning, and teaching by demonstration.
Head of line: Carme Torras Genís

Research areas
>> Learning by demonstration
>> Planning for perception and manipulation
>> Perception of rigid and non-rigid objects
Tech. transfer
Our activity finds applications in several fields through collaboration with our technological partners
Facilities
Research projects
We carry out projects from national and international research programmes.
→ More about our research projects
<< Back to Perception and Manipulation main page
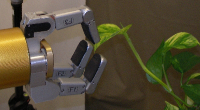
Learning by demonstration
We devise methods to learn object-action relations to accomplish tasks at different levels of abstraction, where object models are generated from visual and depth information, and actions, involving manipulation skills, are learned from demonstrations provided by a human using multimodal algorithms that combine vision and haptics.

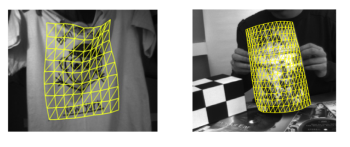
Planning for perception and manipulation
We are interested in view planning for object modeling, as well as manipulation planning, with special interest in deformable objects. High-level task formulations are integrated with low-level geometry-based methods and simplified physical models, together with an on-line sensory-based treatment of uncertainty, so as to come up with specific sequences of motion commands.

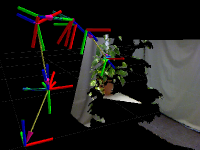
Perception of rigid and non-rigid objects
Our objective is to investigate computer vision algorithms for interpreting and understanding scenes from images, with applications in robotics and medical imaging. In particular, our activities are concentrated on retrieving rigid and non-rigid shape, motion and camera pose from single images and video sequences.
These are the latest research projects of the Perception and Manipulation research line:

-

ARISE: Advanced AI and RobotIcS for autonomous task pErformance
European Project
Start Date: 01/01/2024

-

SoftEnable: Towards Soft Fixture-Based Manipulation Primitives Enabling Safe Robotic Manipulation in Hazardous Healthcare and Food Handling Applications
European Project
Start Date: 01/10/2022

-

SECUROPS: User-centred Security Framework for Social Robots in Public Space
European Project
Start Date: 01/01/2021


-

IPALM: Interactive Perception-Action-Learning for Modelling Objects
European Project
Start Date: 01/10/2019
-

IMAGINE: Robots understanding their actions by imagining their effects
European Project
Start Date: 01/01/2017

-

I-DRESS: Assistive interactive robotic system for support in dressing
European Project
Start Date: 01/12/2015
-

ViSen: Visual Sense, Tagging visual data with semantic descriptions
European Project
Start Date: 01/07/2013
-

IntellAct: Intelligent observation and execution of Actions and manipulations
European Project
Start Date: 01/03/2011

-

PACOPLUS: Perception, action & cognition through learning of object-action complexes.
European Project
Start Date: 01/02/2006
-

PARALIN: Parallel computing modelling for industrial problems
European Project
Start Date: 01/06/1996
-

DEMETER 5.0: Sistema digitalizado para la producción sostenible de algodón hidropónico en invernadero
National Project
Start Date: 01/11/2022
-

SMARTGAZE II: Sistema de Movilidad Autónoma y Segura para personas con Baja Visión en entornos urbanos
National Project
Start Date: 01/09/2022
-

ROB-IN: Robots para la asistencia continua y personalizada capaces de explicarse a sí mismos
National Project
Start Date: 01/12/2021
-

DOVE: Digitalización de organismos vivos en movimiento a partir de vídeos casuales
National Project
Start Date: 29/09/2023
-

CHLOE-GRAPH: ClotH-Like ObjEcts Grasping, Representation, and Action Planning
National Project
Start Date: 01/09/2021

-

GREAT: Beyond Graph Neural Networks: Joint graph topology learning and graph-based inference for computer vision
National Project
Start Date: 01/06/2020
-
HuMoUR: Markerless 3D human motion understanding for adaptive robot behavior
National Project
Start Date: 01/01/2018
-

RobInstruct: Instructing robots using natural communication skills
National Project
Start Date: 01/01/2015
-

REST: Computación mediante restricciones en robótica y gestión de recursos
National Project
Start Date: 31/12/1999
-
REDINTER: Oficina de proyectos europeos e internacionales del IRI
CSIC Project
Start Date: 01/01/2024
-
MARE: Manipulación robotizada: Aprendizaje por demostración y Refuerzo
CSIC Project
Start Date: 15/12/2018


-
AECEX 2022: Ayuda extraordinaria a Unidad de Excelencia María de Maeztu 2022
CSIC Project
Start Date: 15/03/2022
-
AECEX: Ayuda extraordinaria a Unidad de Excelencia María de Maeztu
CSIC Project
Start Date: 24/03/2021
-
CONPRERO: NonLinear Predictive Control For Robotic Systems With High Dynamics
CSIC Project
Start Date: 15/01/2021
-
R3OBJ: Reconstrucción 3D, localización y segmentación automática de objetos a partir de imágenes
CSIC Project
Start Date: 22/11/2018



-
CINNOVA: Modelos cinemáticos y técnicas de aprendizaje para robots de estructura innovadora
CSIC Project
Start Date: 01/07/2011
-

MVOD: Medición eficiente de volúmenes de objetos deformables con cámaras rentables
CSIC Project
Start Date: 01/03/2012
-

APREN: Modelos perceptivos y técnicas de aprendizaje para robots de servicios
CSIC Project
Start Date: 01/01/2010
-

BPnP: Priors para la detección 3D en tiempo real de objetos rígidos y deformables
CSIC Project
Start Date: 01/10/2008
-

SGR RobIRI: Grup consolidat de Percepció i Manipulació Robotitzada de l'IRI
Regional Project
Start Date: 01/01/2022
-
FRAILWATCH: Sistema de Monitorització Robòtic de la Fragilitat per a Persones Grans
Regional Project
Start Date: 10/11/2023

-

LABORA 2023: Consolidació del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2023
-
PreLabORA: Posada en marxa del Laboratori Obert de Robòtica Assistencial
Regional Project
Start Date: 01/01/2022
-

SGR RobIRI: Grup consolidat de Percepció i Manipulació Robotitzada de l'IRI
Regional Project
Start Date: 01/01/2017
-

SIMBIOTS: Facilitar una introducció de la robòtica a nous processos i aplicacions dintre de la industria
Regional Project
Start Date: 01/01/2018




-
PYERCING: Open your ears: predicting object material from impact sounds
UPC Project
Start Date: 01/07/2020
-
MP-CloL: Learning Robotic Cloth Manipulation based on Physics Models and Model Predictive Control
UPC Project
Start Date: 01/07/2020
-
SPECTACLE: From Spectators to Actors: Understanding Social Interactions through the Eyes of a Participant
UPC Project
Start Date: 01/10/2019
-
MESSI: Camera Self-Calibration for Structure from Motion on Dynamic Scenarios
UPC Project
Start Date: 01/10/2019
-
iMOVE: Development of a hybrid control interface based on sEMG and movement signals for an assistive robotic manipulator
UPC Project
Start Date: 01/10/2019
-
LatCom: Variable Impedance Control with Movement Primitives in Latent Spaces During Compliant Manipulation
UPC Project
Start Date: 01/01/2019

-
LLULL: Librerías de tratamiento de datos, modelado y exploración de procesos industriales
Technology Transfer Contract
Start Date: 03/07/2019
-
Text4Pose: Leveraging text to improve human pose, shape, motion estimation and generation
Technology Transfer Contract
Start Date: 15/09/2021
-
PIONEER: Projecte Innovador OrieNtat a dissEnyar l’atEnció socIosanitària del futur
Technology Transfer Contract
Start Date: 22/11/2023
-
DeepRender: Deep Neural Rendering for Cinematography
Technology Transfer Contract
Start Date: 15/02/2022
-
DeepSoccer: Deep Learning Technology applied to Soccer Videos
Technology Transfer Contract
Start Date: 20/05/2019
-

Amazon ResearchAward: Geometry-aware 3D Human Body Animation from Still Photos
Technology Transfer Contract
Start Date: 14/03/2019
-
FACEREC3D: Solucions en reconeixement facial robust a atacs de falsificació utilitzant càmeres TOF
Technology Transfer Contract
Start Date: 25/05/2023
-
MAPRICOM: Suport i desenvolupament d'un sistema de manteniment predictiu
Technology Transfer Contract
Start Date: 15/02/2023
-
IMPROFIT: Estimació de la posició del cos humà a partir d’imatges de dispositius mòbils
Technology Transfer Contract
Start Date: 01/10/2021
-
PADEL: Asesoramiento visión por ordenador para partidos de pádel
Technology Transfer Contract
Start Date: 29/06/2021
-
HELIPORTS: Desarrollo de soluciones de visión por computador para la gestión de helipuertos y aeródromos
Technology Transfer Contract
Start Date: 06/05/2021
-
APYUR: Asesoramiento para el análisis y ensayo en el desarrollo de un sistema de visión multi-cámara para identificación de personas
Technology Transfer Contract
Start Date: 26/07/2021
-

Google ResearchAward: GANimation3D: Unsupervised 3D Face Animation from Monocular Images
Technology Transfer Contract
Start Date: 01/10/2019
-
SLD: Proceso automatizado de detección y clasificación inteligente de pieles (smart leather detector)
Technology Transfer Contract
Start Date: 06/03/2018
-
AIPICS: Desarrollo de un sistema integral de control de la producción dotado de inteligencia artificial y capacidad de autodecisión
Technology Transfer Contract
Start Date: 01/01/2018
-
RELAPP: Aplicació electrònica portàtil controlada per una APP per a la mesura in situ de l’elasticitat de materials visco-elàstics
Technology Transfer Contract
Start Date: 19/10/2020
-

SCIACE: Sistema de climatización inteligente auto-adaptativo a las condiciones del entorno
Technology Transfer Contract
Start Date: 15/12/2017
-
3T-SLTE: Grupo tractor para elevadores con gestión inteligente de energía integrada
Technology Transfer Contract
Start Date: 11/03/2015
-
PERSEO: Paquete escalable robusto soluciones específicas orientadas
Technology Transfer Contract
Start Date: 26/05/2016
-

Google Faculty Award: Geometry-aware CNNs for Non-Rigid Shape Reconstruction
Technology Transfer Contract
Start Date: 17/02/2017
-

TERMOSOLD: Desarrollo de un sistema basado en técnicas de inteligencia artificial para la inspección de soldaduras en lineas de envasado horizontal
Technology Transfer Contract
Start Date: 10/03/2015
-

CRISTALBREAD: Investigació de la capacitat de tecnologíes de robotització intel.ligent per a la manipulació de masses de panificació altament hidratades
Technology Transfer Contract
Start Date: 01/03/2015
-

SENECA: Semi-automatic neuron reconstruction in CATMAID
Technology Transfer Contract
Start Date: 01/09/2015
-

SITVIA: Sistema de inspección de tampografía por visión artificial adaptable
Technology Transfer Contract
Start Date: 07/09/2015
-

AutomaticTV: Algorithms for automatic audiovisual production
Technology Transfer Contract
Start Date: 24/10/2014
-

RecycLearn: Desarrollo de tecnología para aprendizaje autónomo de un brazo robótico - Aplicación a plantas de reciclaje.
Technology Transfer Contract
Start Date: 01/09/2013

-

ROBOSOFT: Sistema de visió d'ajuda a la conducció per al vehicle NICOLAS-VTCU
Technology Transfer Contract
Start Date: 23/02/2006
These are the most recent publications (2024 - 2023) of the Perception and Manipulation
-
E. Corona, G. Alenyà, G. Pons-Moll and F. Moreno-Noguer. LayerNet: high-resolution semantic 3D reconstruction of clothed people. IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(2): 1257-1272, 2024.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
M. Dalmasso, J.E. Domínguez, I.J. Torres, P. Jiménez, A. Garrell Zulueta and A. Sanfeliu. Shared task representation for human–robot collaborative navigation: The collaborative search case. International Journal of Social Robotics, 16: 145-171, 2024.
Abstract
Info
PDF
-
C. Torras. Ethics of social robotics: Individual and societal concerns and opportunities. Annual Review of Control, Robotics, and Autonomous Systems, 7(1), 2024, to appear.
Abstract
Info
PDF
-
A. Civit, A. Andriella, C. Barrue, M. Antonio, C. Boqué and G. Alenyà. Introducing social robots to assess frailty in older adults, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 342–346.
Abstract
Info
PDF
-
G. Tzelepis, A. Eren Erdal, J. Borràs and G. Alenyà. Semantic state estimation in robot cloth manipulations using domain adaptation from human demonstrations, 19 International Conference on Computer Vision Theory and Applications, 2024, Rome, pp. 172-182.
Abstract
Info
PDF
-
F. Coltraro, J. Amorós, M. Alberich-Carramiñana and C. Torras. A novel collision model for inextensible textiles and its experimental validation. Applied Mathematical Modelling, 128: 287-308, 2024.
Abstract
Info
PDF
-
T. Love, A. Andriella and G. Alenyà. Towards explainable proactive robot interactions for groups of people in unstructured environments, 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, Boulder, CO, USA, pp. 697–701.
Abstract
Info
PDF
-
A. Luque, D. Parent, A. Colomé, C. Ocampo-Martínez and C. Torras. Model predictive control for dynamic cloth manipulation: Parameter learning and experimental validation. IEEE Transactions on Control Systems Technology: 1-17, 2024, to appear.
Abstract
Info
PDF
-
D. Blanco-Mulero, O. Barbany, G. Alcan, A. Colomé, C. Torras and V. Kyrki. Benchmarking the sim-to-real gap in cloth manipulation. IEEE Robotics and Automation Letters, 9(3): 2981-2988, 2024.
Abstract
Info
PDF
-
P. Jiménez. Inside-out states of garments. Technical Report IRI-TR-24-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2024.
Abstract
Info
PDF
-
C. Torras. Presente y futuro de los robots asistenciales: Desafíos tecnocientíficos y éticos. Real Academia de Ingeniería, 2024.
Abstract
Info
PDF
-
C. Angulo, A. Chacón and P. Ponsa. Towards a cognitive assistant supporting human operators in the Artificial Intelligence of Things. Internet of Things, 21: 100673, 2023.
Abstract
Info
PDF
-
A. Urdapilleta and A. Agudo. Comparative study of feature localization methods for endoscopy image matching, 2023 IEEE International Conference on Image Processing Challenges and Workshops, 2023, Kuala Lumpur, Malaysia, pp. 3719-3723, IEEE.
Abstract
Info
PDF
-
G.D. Delmas, P. Weinzaepfel, F. Moreno-Noguer and G. Rogez. PoseFix: correcting 3D human poses with natural language, 2023 International Conference on Computer Vision, 2023, Paris, France, pp. 14972-14982.
Abstract
Info
PDF
-
C. Torras. Robótica asistencial. Retos éticos en la ayuda y acompañamiento a cuidadores y pacientes. In Soledad no deseada en la era digital, 38-46. Fundació Víctor Grífols i Lucas, 2023.
Abstract
Info
PDF
-
G. Tzelepis, J. Borràs, A. Eren Erdal and G. Alenyà. Semantic state prediction in robotic cloth manipulation, 2023 Intelligent Systems Conference, 2023, Amsterdam, pp. 205-219, Springer Lecture Notes in Networks and Systems.
Abstract
Info
PDF
-
E. Pignaton, J. Olszewska, J.L. Carbonera, S. Fiorini, A. Khamis, V.R. Kumar, M. Barreto, E. Prestes, M.K. Habib, S. Redfield, A. Chibani, P. Goncalves, J. Bermejo-Alonso, R. Sanz, E. Tosello, A. Olivares-Alarcos, A.A. Konzen, J. Quintas and H. Li. Ontological concepts for information sharing in cloud robotics. Journal of Ambient Intelligence and Humanized Computing, 14: 4921–4932, 2023.
Abstract
Info
PDF
-
S. Forgas, R. Huertas, A. Andriella and G. Alenyà. Gendered human–robot interactions in services. International Journal of Social Robotics, 15(11): 1791-1807, 2023.
Abstract
Info
PDF
-
E. Thomaz and M. Dimiccoli. Acquisition and analysis of camera sensor data (Lifelogging). In Mobile Sensing in Psychology. Methods and Applications, 277-296. Guilford Publications, 2023.
Abstract
Info
-
A. Andriella, C. Torras, C. Abdelnour and G. Alenyà. Introducing CARESSER: A framework for in situ learning robot social assistance from expert knowledge and demonstrations. User Modeling and User-Adapted Interaction, 33: 441-496, 2023.
Abstract
Info
PDF
-
C. Torras and L.G. Ludescher. Writing science fiction as an inspiration for AI research and ethics dissemination. In Human-Centered Artificial Intelligence: Advanced Lectures, 322-344. Cham: Springer International Publishing, 2023.
Abstract
Info
PDF
-
C. Torras. Robòtica assistencial: una aposta per l'envelliment saludable i sostenible. In Bioética: una mirada cap al futur, 216-225. Fundació Víctor Grífols i Lucas, 2023.
Abstract
Info
PDF
-
G. Canal, C. Torras and G. Alenyà. Generating predicate suggestions based on the space of plans: an example of planning with preferences. User Modeling and User-Adapted Interaction, 33: 333-357, 2023.
Abstract
Info
PDF
-
A. Olivares-Alarcos, S. Foix and G. Alenyà. Time to contact for robot safety stop in close collaborative tasks. In Human-robot collaboration: unlocking the potential for industrial applications, 87-104. Institution of Engineering Technology, 2023.
Abstract
Info
PDF
-
C. Torras. Desplegament ètic de la robòtica assistencial per a un envelliment saludable i sostenible. In La medicina al segle xxi, avenços i límits, 35-44. Universitat d'Estiu i Tardor d'Andorra, Govern d'Andorra, 2023.
Abstract
Info
PDF
-
S. Forgas, R. Huertas, A. Andriella and G. Alenyà. Does the personality of consumers influence the assessment of the experience of interaction with social robots?. International Journal of Social Robotics, 2023, to appear.
Abstract
Info
PDF
-
R. Pérez, A. Espersen and A. Agudo. Robust wind turbine blade segmentation from RGB images in the wild, 2023 IEEE International Conference on Image Processing, 2023, Kuala Lumpur, Malaysia, pp. 1025-1029.
Abstract
Info
PDF
-
C. Torras. Eduquem les criatures... també les artificials!. Serra d'Or, 760: 28-29, 2023.
Abstract
Info
PDF
-
M. Arduengo, A. Colomé, J. Lobo, L. Sentis and C. Torras. Gaussian-process-based learning from demonstration. Journal of Ambient Intelligence and Humanized Computing, 2023, to appear.
Abstract
Info
PDF
-
A. San-Miguel, V. Puig and G. Alenyà. Condition-based design of variable impedance controllers from user demonstrations. Control Engineering Practice, 140: 105658, 2023.
Abstract
Info
PDF
-
C. Torras. Humans i robots: ¿qui modela qui?. El Món d'Ahir, 26: 134-143, 2023.
Abstract
Info
PDF
-
S. Forgas, R. Huertas, A. Andriella and G. Alenyà. Social robot-delivered customer-facing services: an assessment of the experience. The Service Industries Journal, 43(3): 154-184, 2023.
Abstract
Info
PDF
-
S. Izquierdo, G. Alenyà and C. Rizzo. Adaptive Human-Robot Collaboration: evolutionary learning of action costs using an action outcome simulator, 32nd IEEE International Symposium on Robot and Human Interactive Communication, 2023, Busan, Korea, pp. 1901-1907.
Abstract
Info
PDF
-
L.M. Lach, N. Funk, R. Haschke, S. Lemaignan, H. Ritter, J. Peters and G. Chalvatzaki. Placing by touching: An empirical study on the importance of tactile sensing for precise object placing, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, Detroit, MI, USA, pp. 8964-8971.
Abstract
Info
PDF
-
F. Amadio, J.A. Delgado-Guerrero, A. Colomé and C. Torras. Controlled Gaussian process dynamical models with application to robotic cloth manipulation. International Journal of Dynamics and Control , 11: 3209-3219, 2023.
Abstract
Info
PDF
-
R. Cupec, I. Vidovic, V. Simundic, P. Pejic, S. Foix and G. Alenyà. Teaching a robot where doors and drawers are and how to handle them, 32nd IEEE International Symposium on Robot and Human Interactive Communication, 2023, Busan, Korea, pp. 2288-2294.
Abstract
Info
PDF
-
L.M. Lach, N. Funk, R. Haschke, H. Ritter, J. Peters and G. Chalvatzaki. Tactile sensing for stable object placing, 2023 Workshop on Touch Processing: a new Sensing Modality for AI at NeurIPS 2023 , 2023, New Orleans (LA), USA, pp. 1-10.
Abstract
Info
PDF
-
J. Borràs, A. Boix, S. Foix and C. Torras. A virtual reality framework for fast dataset creation applied to cloth manipulation with automatic semantic labelling, 2023 IEEE International Conference on Robotics and Automation, 2023, London (UK), pp. 11605-11611.
Abstract
Info
PDF
-
M. Pérez and A. Agudo. Sensor-agnostic multimodal fusion for multiple object tracking from camera, radar, lidar and V2X, 2023 FISITA 2023 World Congress, 2023, Barcelona, to appear.
Abstract
Info
PDF
-
L.M. Lach, R. Haschke, D. Tateo, J. Peters, H. Ritter, J. Borràs and C. Torras. Towards transferring tactile-based continuous force control policies from simulation to robot, 2023 Workshop on Touch Processing: a new Sensing Modality for AI at NeurIPS 2023 , 2023, New Orleans (LA), USA, pp. 10.
Abstract
Info
PDF
-
A. Agudo. Detail-aware uncalibrated photometric stereo, 2023 IEEE International Conference on Acoustics, Speech and Signal Processing, 2023, Rhodes Island, Greece, pp. 1-5.
Abstract
Info
PDF
-
M. Pérez and A. Agudo. Robust multimodal and multi-object tracking for autonomous driving applications, 2023 International Conference on Advanced Robotics, 2023, Abu Dhabi, UAE, pp. 100-106, IEEE.
Abstract
Info
PDF
-
M. Bellver, C. Ventura, C. Silberer, I. Kazakos, J. Torres and X. Giro-i-Nieto. A closer look at referring expressions for video object segmentation. Multimedia Tools and Applications, 82: 4419-4438, 2023.
Abstract
Info
PDF
-
D.F. Ordoñez, M. Martin, A. Agudo and F. Moreno-Noguer. On discrete symmetries of robotics systems: A group-theoretic and data-driven analysis, 2023 Robotics: Science and Systems Conference, 2023, Daegu, Republic of Korea.
Abstract
Info
PDF
-
E. Caldarelli, A. Colomé, C. Ocampo-Martínez and C. Torras. Quadratic dynamic matrix control for fast cloth manipulation, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, Detroit, MI, USA, pp. 8178-8185.
Abstract
Info
PDF
-
M. Alberich-Carramiñana, J. Guàrdia, E. Nart and J. Roé. Valuative trees over valued fields. Journal of Algebra, 614: 71-114, 2023.
Abstract
Info
PDF
-
F. Coltraro, J. Fontana, J. Amorós, M. Alberich-Carramiñana, J. Borràs and C. Torras. A representation of cloth states based on a derivative of the Gauss Linking Integral. Applied Mathematics and Computation, 457: 128165, 2023.
Abstract
Info
PDF
-
R. Ren, M. Gurnani Rajesh, J. Sanchez, A. López, F. Zhang, Y. Tian, G. Alenyà, A. Agudo, Y. Demiris, K. Mikolajczyk and F. Moreno-Noguer. Grasp-oriented fine-grained cloth segmentation without real supervision, 2023 6th International Conference on Machine Vision and Applications, 2023, Singapore, pp. 147-153.
Abstract
Info
PDF
-
B.M. Lopes, R. Marques , D. Faustino, P. Ilheu, T. Santos , J. Sousa and A.D. Rocha. Enhance the injection molding quality prediction with artificial intelligence to reach zero-defect manufacturing. Processes, 11(1): 62, 2023.
Abstract
Info
PDF
-
A. Olivares-Alarcos, A. Andriella, S. Foix and G. Alenyà. Robot explanatory narratives of collaborative and adaptive experiences, 2023 IEEE International Conference on Robotics and Automation, 2023, London (UK), pp. 11964-11971.
Abstract
Info
PDF
-
E. Caldarelli, A. Chatalic, A. Colomé, L. Rosasco and C. Torras. Heteroscedastic Gaussian processes and random features: scalable motion primitives with guarantees, 2023 Conference on Robot Learning, 2023, Atlanta, GA, USA, pp. 3010-3029, PMLR.
Abstract
Info
PDF
-
E. Barbecho-Jimbo, D. Vallejo-Ramírez, J. Cobos-Torres, C. Angulo and C. Flores-Vázquez. Remote operation of CeCi social robot . Robotics, 12(1): 19, 2023.
Abstract
Info
PDF
-
F. Coltraro, J. Amorós, M. Alberich-Carramiñana and C. Torras. Reconstruction of sampled surfaces with boundary via Morse theory, 2023 Congreso Español de Informática Gráfica, 2023, Mallorca, pp. 21-24.
Abstract
Info
PDF
-
A. Dhamanaskar, M. Dimiccoli, E. Corona, A. Pumarola and F. Moreno-Noguer. Enhancing egocentric 3D pose estimation with third person views . Pattern Recognition, 138(109358), 2023.
Abstract
Info
PDF
-
D.F. Ordoñez, M. Martin, A. Agudo and F. Moreno-Noguer. Morphological symmetries in robot learning, 2023 RSS Workshop on Symmetries in Robot Learning, 2023, Daegu (South Korea), pp. 1-5.
Abstract
Info
PDF
-
E.B. Bueno Benito, B. Tura and M. Dimiccoli. Leveraging triplet loss for unsupervised action segmentation, 2023 CVPR Workshop on Learning with Limited Labelled Data, 2023, Vancouver, Canadá, pp. 4922-4930, IEEE.
Abstract
Info
PDF
-
A. Suárez, A. Andriella, C. Torras and G. Alenyà. User interactions and negative examples to improve the learning of semantic rules in a cognitive exercise scenario, 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2023, Detroit, MI, USA, pp. 7953-7960.
Abstract
Info
PDF
-
P. Caselles, E. Ramon, J. Garcia, X. Giro-i-Nieto, F. Moreno-Noguer and G. Triginer. SIRA: Relightable Avatars from a Single Image, 2023 IEEE Winter Conference on Applications of Computer Vision, 2023, Waikoloa, Hawaii, pp. 775-784.
Abstract
Info
PDF
Perception and Manipulation Laboratory
The Perception and Manipulation Laboratory is the main facility devoted to experimentation on the topics of the research line. It occupies 142 m² in the second floor of the Faculty, and a large part hosts a life-scale mock-up of a (quite) small apartment (35 m²). Two PAL one-armed mobile TIAGo robots dwell within the apartment, but are occasionally taken out for experimentation elsewhere. There is also a manipulation area equipped with two WAM robot arms and a KINOVA manipulator, and workplaces are distributed along the perimeter. Next to the laboratory, with a direct view through a window, there is the Scientific and Technical Lab support office.
The Laboratory is further equipped with commercial and self-developed grippers, sensing devices, and augmented reality appliances. Laboratory service offers quick experimental setup, several standardized software tools, and expertise in robot control and perception algorithms. It also hosted the Humanoids Lab Initiative in the past, and we still keep 15 small humanoid robots for educational or promotional purposes.


Researchers
-
Agudo Martínez, Antonio
 aagudo (at) iri.upc.edu
aagudo (at) iri.upc.edu
-
Alberich Carramiñana, Maria
alberich (at) iri.upc.edu
-
Alenyà Ribas, Guillem
galenya (at) iri.upc.edu
-
Andriella, Antonio
aandriella (at) iri.upc.edu
-
Angulo Bahon, Cecilio
cangulo (at) iri.upc.edu
-
Aryania, Azra
aaryania (at) iri.upc.edu
-
Barrue Subirana, Cristian
cbarrue (at) iri.upc.edu
-
Blanco Mulero, David
dblancom (at) iri.upc.edu
-
Borràs Sol, Júlia
jborras (at) iri.upc.edu
-
Colomé Figueras, Adrià
acolome (at) iri.upc.edu
-
Coltraro, Franco
fcoltraro (at) iri.upc.edu
-
Dimiccoli, Mariella
mdimiccoli (at) iri.upc.edu
-
Foix Salmerón, Sergi
sfoix (at) iri.upc.edu
-
Grosch Obregon, Patrick John
pgrosch (at) iri.upc.edu
-
Jiménez Schlegl, Pablo
jimenez (at) iri.upc.edu
-
Moreno Noguer, Francesc
fmoreno (at) iri.upc.edu
-
Pareto Boada, Júlia
jpareto (at) iri.upc.edu
-
Sanchez Riera, Jordi
jsanchez (at) iri.upc.edu
-
Torras Genís, Carme
torras (at) iri.upc.edu
-
Vallès Peris, Nuria
nvalles (at) iri.upc.edu
PhD Students
-
Barbany Mayor, Oriol
obarbany (at) iri.upc.edu
-
Bueno Benito, Elena Belén
ebueno (at) iri.upc.edu
-
Caldarelli, Edoardo
ecaldarelli (at) iri.upc.edu
-
Canela Jiménez, Antonio
acanela (at) iri.upc.edu
-
Capellera Font, Guillem
gcapellera (at) iri.upc.edu
-
Caselles Rico, Pol
pcaselles (at) iri.upc.edu
-
Civit Bertran, Aniol
acivit (at) iri.upc.edu
-
Delmas, Ginger Diana
gdelmas (at) iri.upc.edu
-
Gallart Agut, Roger
rgallart (at) iri.upc.edu
-
Garcia Camacho, Irene
igarcia (at) iri.upc.edu
-
Gutiérrez Pérez, Marc
mgutierrez (at) iri.upc.edu
-
Izquierdo Badiola, Silvia
sizquierdo (at) iri.upc.edu
-
Lopes E Silva, Bruno Miguel
blopes (at) iri.upc.edu
-
Love, Tamlin
tlove (at) iri.upc.edu
-
Malik Ara, Ibrar
imalik (at) iri.upc.edu
-
Olivares Alarcos, Alberto
aolivares (at) iri.upc.edu
-
Peral Sánchez, Marc
mperal (at) iri.upc.edu
-
Pérez i Gonzalo, Raül
rperez (at) iri.upc.edu
-
Pérez Quintana, Marc
mperez (at) iri.upc.edu
-
Shen, Jianxiong
jshen (at) iri.upc.edu
-
Suárez Hernández, Alejandro
asuarez (at) iri.upc.edu
-
Thakur, Sanket Kumar
sthakur (at) iri.upc.edu
-
Tzelepis, Georgios
gtzelepis (at) iri.upc.edu
-
Ugrinovic, Nicolás
nugrinovic (at) iri.upc.edu
Master Students
-
Aly, Mahmoud
maly (at) iri.upc.edu
-
Dols Ferrez, Arnau
adols (at) iri.upc.edu
-
Domènech Olivé, Anna
adomenech (at) iri.upc.edu
-
Gonzalez Gudiño, Luis
lgudino (at) iri.upc.edu
-
Guzmán Castellana, Manel
mguzman (at) iri.upc.edu
-
Martínez Fernández, Antonio
amartinezf (at) iri.upc.edu
-
Montoya de Paco, Sergio
smontoya (at) iri.upc.edu
-
Raza, Syed Riaz
sraza (at) iri.upc.edu
-
Scaloppino, Marianna
mscaloppino (at) iri.upc.edu
-
Syed Riaz, Raza
rsyed (at) iri.upc.edu
-
Tapia Palacio, Guillem
gtapia (at) iri.upc.edu
-
Wallgren, Carl Ian
cwallgren (at) iri.upc.edu
TFG Students
-
Arribalzaga Jové, Carlos
carribalzaga (at) iri.upc.edu
-
Baldrís Vendrell, Oriol
obaldris (at) iri.upc.edu
Support Staff
-
Ariosa Hernández, Roberto
rariosa (at) iri.upc.edu
-
Blázquez González, Xabier
xblazquez (at) iri.upc.edu
-
Budria Fernández, Alvaro Francesc
abudria (at) iri.upc.edu
-
González Valdivia, Guillem
ggonzalez (at) iri.upc.edu
-
Lach, Luca Michael
llach (at) iri.upc.edu
-
Maté Angulo, Alberto
amate (at) iri.upc.edu
-
Oriol Lladó, Jaume
joriol (at) iri.upc.edu
-
Salido Luis-Ravelo, Pablo
psalido (at) iri.upc.edu


Follow us!