|
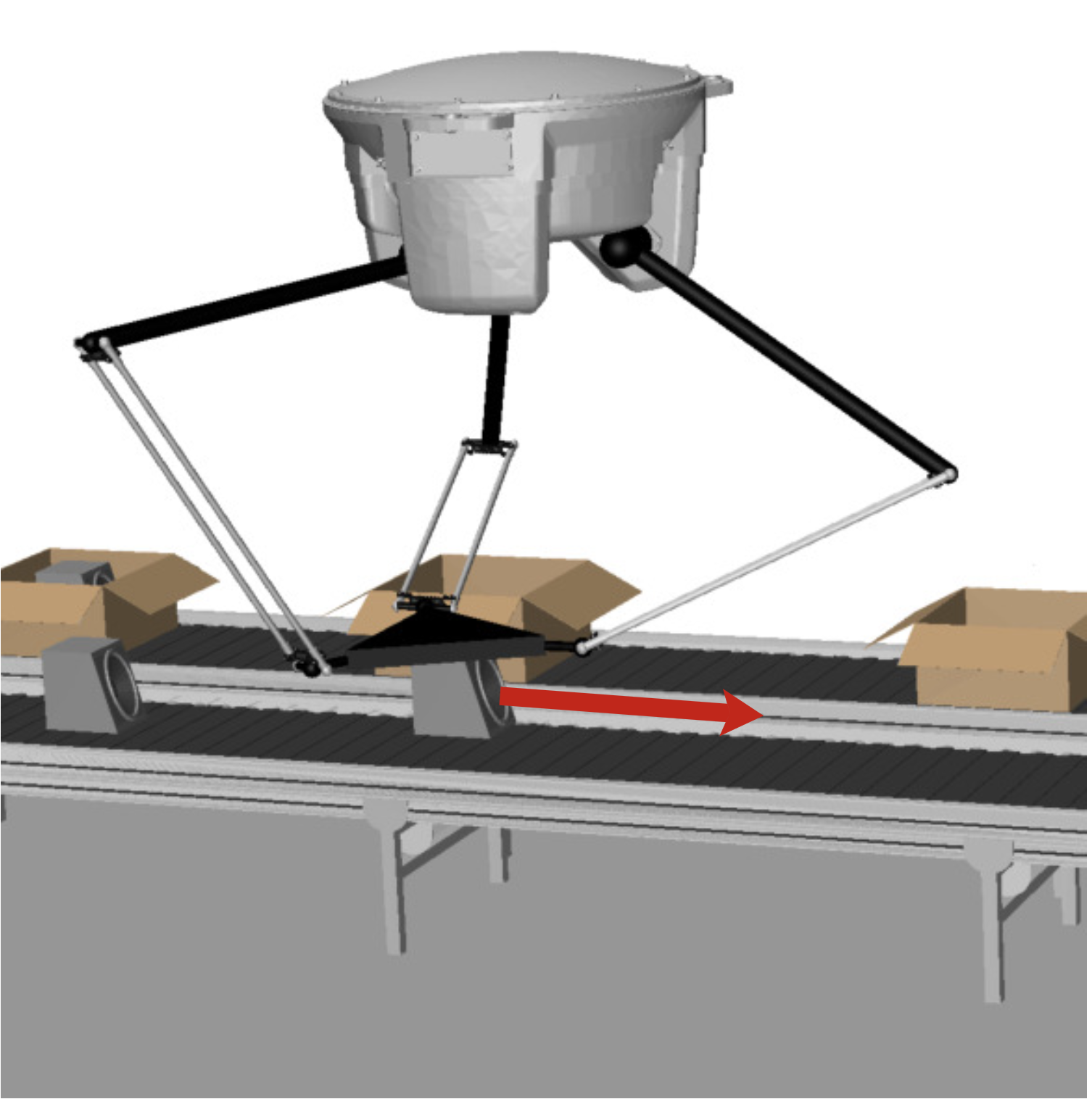
Delta_dynamics.world File Reference IntroductionThis task consists in picking a loudspeaker from a conveyor belt moving at a certain speed, to later place it inside a static box on a second belt. Obstacles play a major role in this example, as the planner has to avoid the collisions of the robot with the conveyor belts, the boxes, and the supporting structure, while respecting the joint limits.
ModelThe robot is formed by a fixed base connected to a moving platform by means of three legs. Each leg is an R-R-Pa-R chain, where R and Pa refer to a revolute and a parallelogram joint respectively. The Pa joint is a planar four-bar mechanism whose opposite sides are of equal length. While it seems that such a leg should be modelled with seven joint angles, we use the fact that the leg is kinematically equivalent to an R-U-U chain, where U refers to a universal joint. By noting that a U joint is equivalent to two R joints with orthogonal axes, we conclude that only five angles are needed to define a leg configuration. See a leg of a Delta robot (left) and its equivalent R-U-U chain (right). 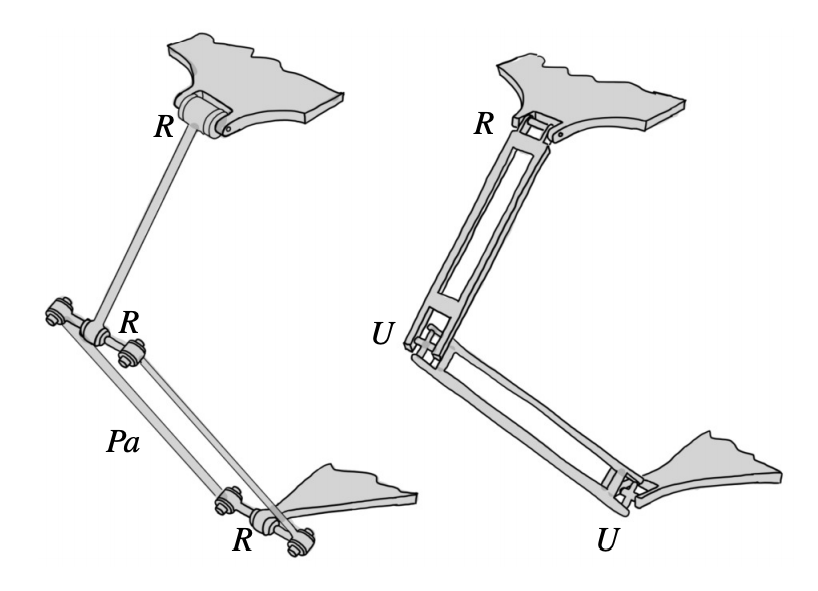 Note that only the three base joints are actuated. The set of geometric and dynamic parameters are given within the world file accessible at the bottom of the page. Problem DimensionsConsidering we are using the equivalent R-U-U chain, the dimensions of the problem are
Process and ResultsThis example is used to show how the kinodynamic planner treats multi-loop mechanisms surrounded by obstacles. To solve the kinodynamic planning problem, follow these steps (from the main CuikSuite folder):
 Definition in file Delta_dynamics.world. |

Follow us!