|
RobotHand Directory Reference Detailed Description
IntroductionMutlifingered hands are increasingly used as a means of endowing a robot with dexterity and versatility. The ability of such hands to reconfigure themselves reduces the need for changing end-effectors, and the large number of lightweight actuators associated with their degrees of freedom allows for fast, precise, energy-efficient motions of the object held in the hand. The existing Literature already offers a few solutions to the inverse kinematics of robot hands, but all of them are based on local search methods. Drawbacks of such methods include the fact that they just provide one hand configuration for the given contact points (determined by an initial estimation) and that their convergence to a solution is not always guaranteed. While the former drawback prevents choosing, among several solutions, those that satisfy some optimality criterion based on stability, manipulability, or energy consumption, for example, the second drawback impedes obtaining a reliable answer of whether the hand can actually reach the contact points. The purpose of this benchmark is to illustrate how the use of CUIK can help overcoming such limitations by directly computing all possible hand configurations. For further details see [Rosales et al. 2008]. Although the geometric parameters of the hand below are those of the MA-I hand developed at the IOC Robotics Lab, the kinematic model assumed is that of a general anthropomorphic hand, and the technique is thus applicable to any hand following such structure. In fact, hands with a different structure could also be treated, by modelling them appropriately using the systematics provided in [Porta et al. 2008]. GeometryAnthropomorhic hands are made up of a palm and several fingers, one of them acting as a thumb. Non-thumb fingers are normally aligned with each other and with the palm, and they can push against the thumb. The MA-I hand follows this scheme, as shown next: 
The fingers of this hand also follow the conventional anthropomorphic structure, forming a serial chain with four revolute joints. The first and second joints model the metacarpophalangeal joint (abduction/adduction and flexion/extension movements) and are, together, equivalent to a universal joint. The third and fourth joints model, respectively, the proximal and distal interphalangeal joints (flexion/extension movement). The model for finger j (left) and its contact with the object (right) are shown below. Joints are represented as cylinders aligned with their axes. 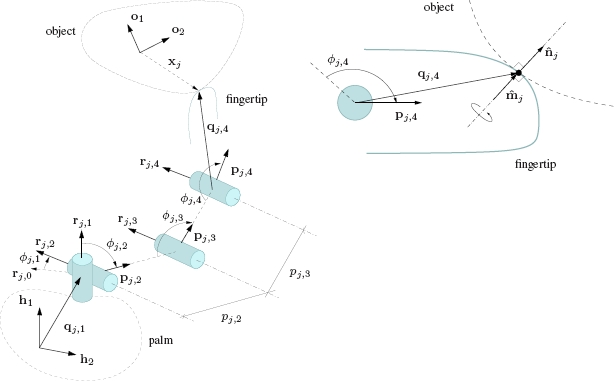
Additionally, this folder also includes formulations for the DLR-II hand. FormulationsThis directory includes the following formulations:
References
| ||||||||||||||||||||||||||||||||||||||||||||
{kind=link}
Follow us!