|
robot.tens File Reference Detailed Description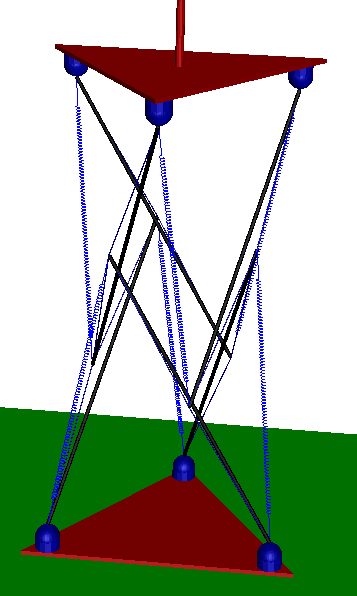
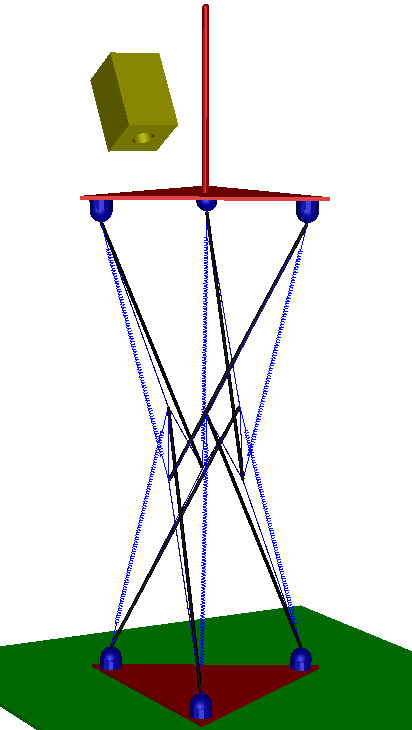
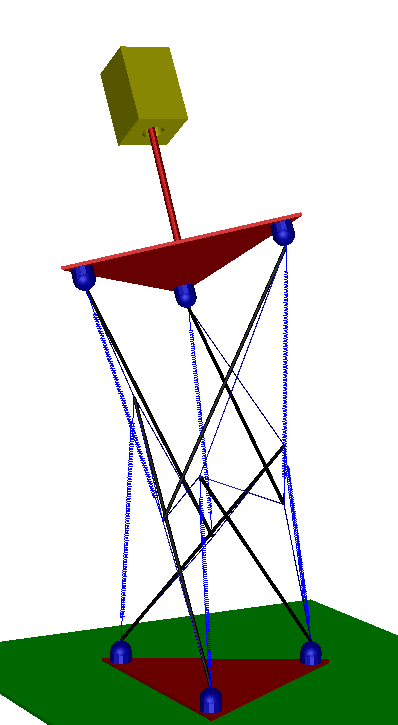
A six degree of freedom tensegrity manipulator following the design by the Tensegriteam. 
Here and here you have videos of the actual robot moving. This is very similar to the Tower3D example but some of the cables are replaced by springs and the symmetry constraints are removed. By controlling the cable rest lengths (and, thus, indirectly the cable lenghts) the platform can be moved in six degrees of freedom. To explore the motions of the platform execute
Where the numbers are used to select the dregrees of freedom of the platform as control variables (in this way the motions are more intuitive). We use this example to solve a path planning problem with a complex tensegrity structure. The start and goal configurations are
and the problem can be solved executing:
The output path can be smoothed
In this way the path length is reduced with a shortcut method and then the control effort is locally minimized with a gradient method. This process is more effective than directly reducing the path effort on the original path: the shortcut path is very effective and it returns a path that is not far from the minimum control effort path (recall that if all elements in the tensegrity are elastic, the control effort and the path length are the same). The smoothed path can be visualized with
The compression/tensions of the struts, cables, and springs can be stored in a file with the command
Moreover, the potential energy along the solution path can be computed with
Definition in file robot.tens. |
Follow us!