|
cuikkinorrt.c File Reference Introduction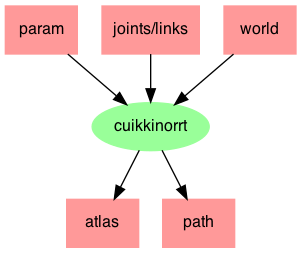
Defines a kinodynamic RRT on a manifold using the method proposed in
Definition in file cuikkinorrt.c.
Function Documentation◆ main()
Main body of the cuikkinorrt application. Defines a kinodynamic RRT using the method described in
This method only uses the differential constraints (even converting the holonomic constraints to its differencial form) and, thus, it does not exploit the underlaying manifold structure. Different integration methods (Euler, RK4) provide different accuracy as far as error w.r.t. the manifold. However, they all accumulate error in the long term. Use:
where
The .world extension is optional.
Definition at line 87 of file cuikkinorrt.c. References CreateFileName(), CS_WD_DELETE, CS_WD_EXT, CS_WD_GET_NUM_SYSTEM_VARS, CS_WD_INIT, CT_BI_RRT, CT_DYNAMICS, CT_N_DOF, DeleteAverages(), DeleteFileName(), DeleteParameters(), DeleteRRT(), DeleteRRTStatistics(), DeleteSamples(), Error(), FALSE, GET_RRT_STATISTICS, GetFileFullName(), GetParameter(), GetRRTNumNodes(), InitAverages(), InitParametersFromFile(), InitRRT(), InitRRTStatistics(), kinobiRRT(), kinoRRT(), NEW, NewSuccesfulExperiment(), NextDynamicStateEuler(), NextDynamicStateRK4(), NO_UINT, ONE_TREE, PARAM_EXT, PrintAverages(), PrintAveragesHeader(), PrintParameters(), PrintRRTDefines(), PrintRRTStatistics(), randomSet(), ReadTwoSamples(), RRT_EXT, RRT_VERBOSE, RRTMemSize(), SaveRRT(), SaveTrajectory(), TRUE, TWO_TREES, and Warning(). | ||||||||||||||||||||||||
Follow us!