Institut de Robòtica
i Informàtica Industrial
Barcelona Robot Lab Dataset
Summary
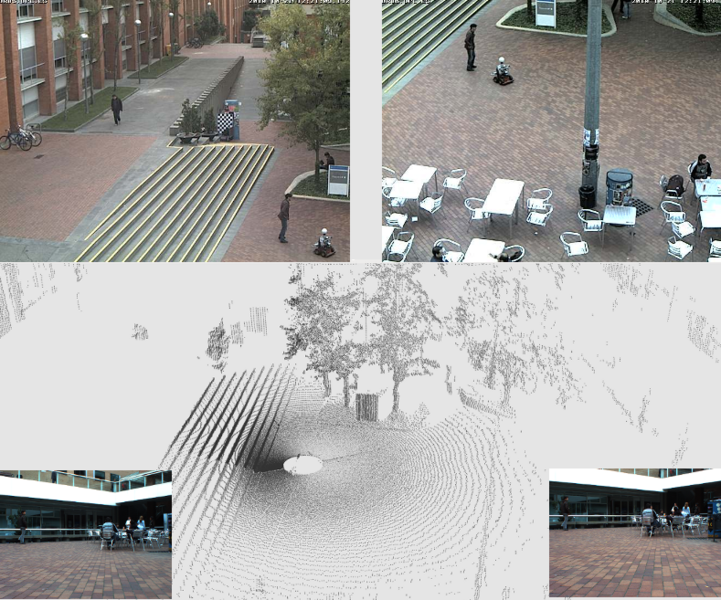
The Barcelona Robot Lab Dataset contains over 12GB of data and is intended for use in mobile robotics and computer vision research. The area surveyed in this data set covers 10000 sq m of the UPC Nord Campus in Barcelona, and includes 3D point clouds, onboard robot imagery as well as imagery from a camera sensor network.
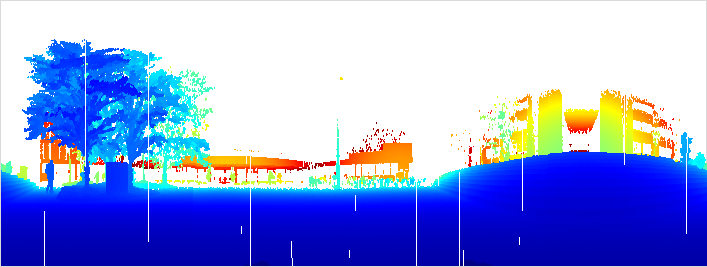
Three aspects make this dataset unique: a) it includes a time-stamped sequence of images from the entire camera sensor network spanning the two days of data gathering, b) it contains impressively rich 3d point clouds obtained with our custom built 3d scanner, and c) we provide a 3d obj file of the scenario for ground truth comparison.
The dataset is intended but not limited to benchmarking algorithms for robust outdoor localization, mapping and navigation, scene understanding and motion pattern analysis in both the robotics and computer vision communities.
Image Examples


![[video]](./img/points_map.png "►")
![[video]](./img/camnet.png "►")
![[video]](./img/stereo_day.png "►")
Scene highlights
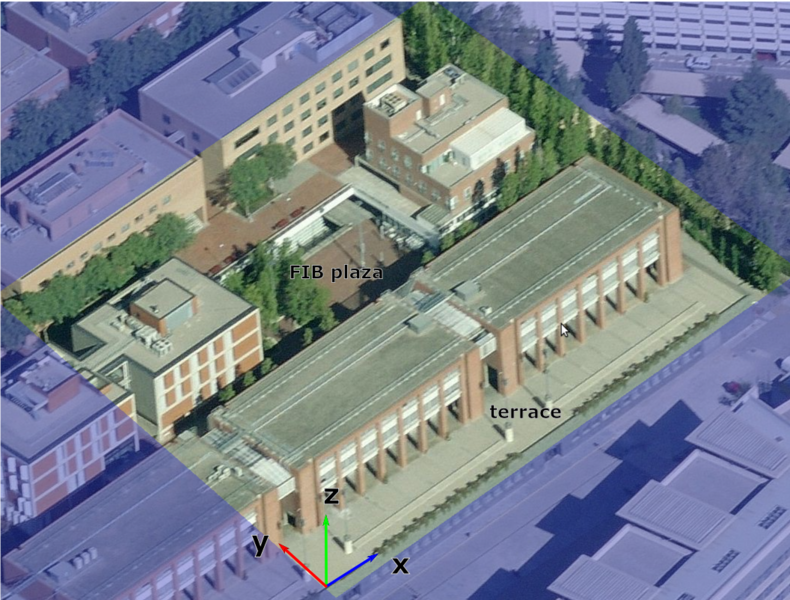
- 10000m2 with several levels and underpasses, moderate vegetation and intermitet gps coverage.
- Severe regularity from buildings inducing aliasing.
- Sunlight exposure with casted shadows.
- Moderate scene dynamics (walking people).
Dataset characteristics
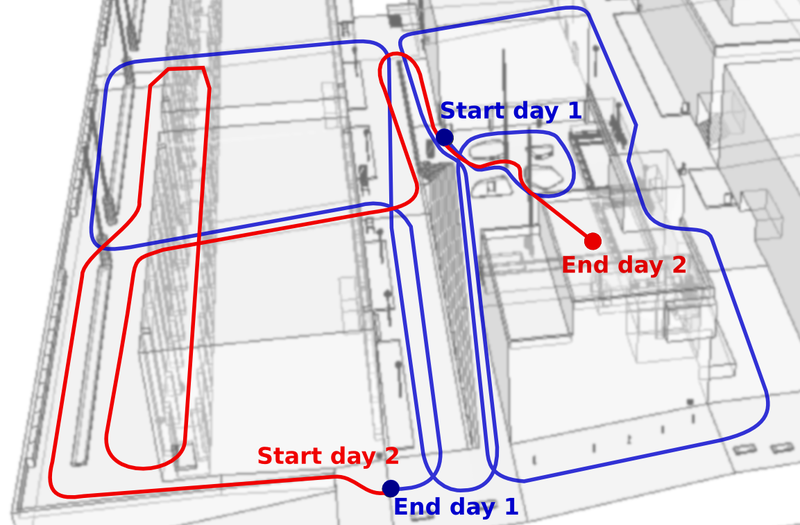
- Divided in two 4h sessions on different days.
- Synchronized timestamped data.
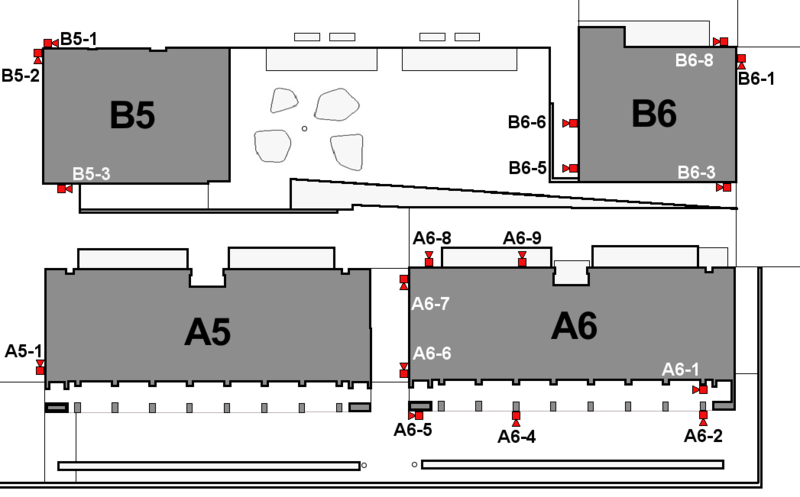
- Simultaneous 640x480 imagery from 17 ip cameras on the sensor network covering the entire area (14671 images).
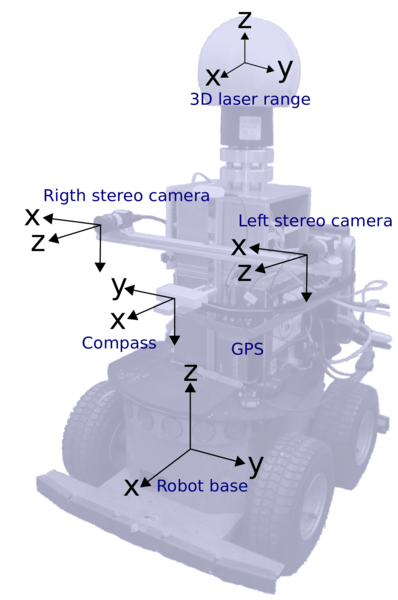
- Imagery from a stereo head onboard the robot (1546 images, Flea2 cameras, 418 mm base line and COMPUTAR M1214-MP optic with 40.4 deg fov).
- Pioneer 3AT robot odometry, ins and motion commands.
- 400 point clouds with 194,580 points each, and resolution of 0.5 deg azim. and 0.25 deg elev. acquired with a Hokuyo UTM-30LX scanner mounted in a slip-ring.
Dataset Scene

Follow us!