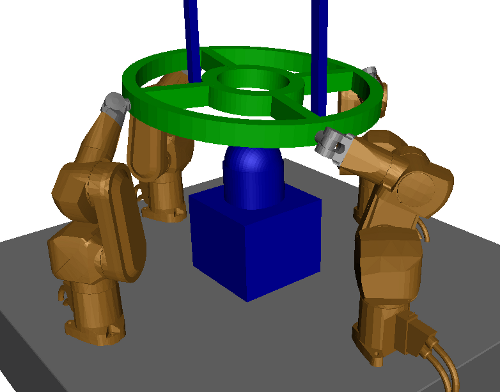
Here we have four Rx60 robots (see Serial6RRX60.world) cooperating to move a large object.
This example is modelled after the PhD thesis of Juan Cortťs.
This example was used in our TRO-13 paper.
The key data for this problem are:
| Ambient space dimension | 24 |
| Configuration space dimension | 6 |
| Average planning time with bin/cuikatlasrrt using a DOF-based representation (in seconds) | 16 |
This example is treated following these steps (from the main CuikSuite folder):
- Adjust the parameters: Different algorithms use different parameter settings. Just check the parameter file (Rotational.param) and uncomment the appropriate lines.
- Solve the path planning problem: using a RRT-like algorithm
- Visualize the solution path:
- Smooth the path:
- Visualize the smoothed solution path:
Definition in file FourRX60.world.
Follow us!