|
TwoArmsB.world File Reference Detailed Description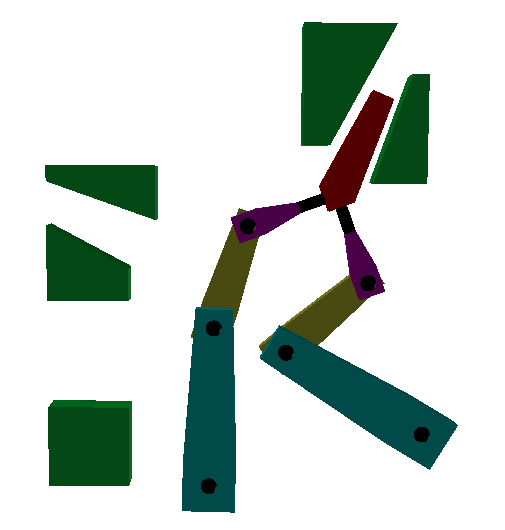
A variant of TwoArmsA.world with an added obstacle. This problem has the particularity that the two arms have to change their working modes along the solution paths. This implies to traverse a singularity which is a challenge for standard sampling-based planners. Note that the singularities in this case refer to the singularities of each one of the arms (singularities on the projection of the configuration space to the sub-space of the three variables of each arm), but not to configuration space singularities. This example is treated following these steps (from the main CuikSuite folder):
Definition in file TwoArmsB.world. |
Follow us!